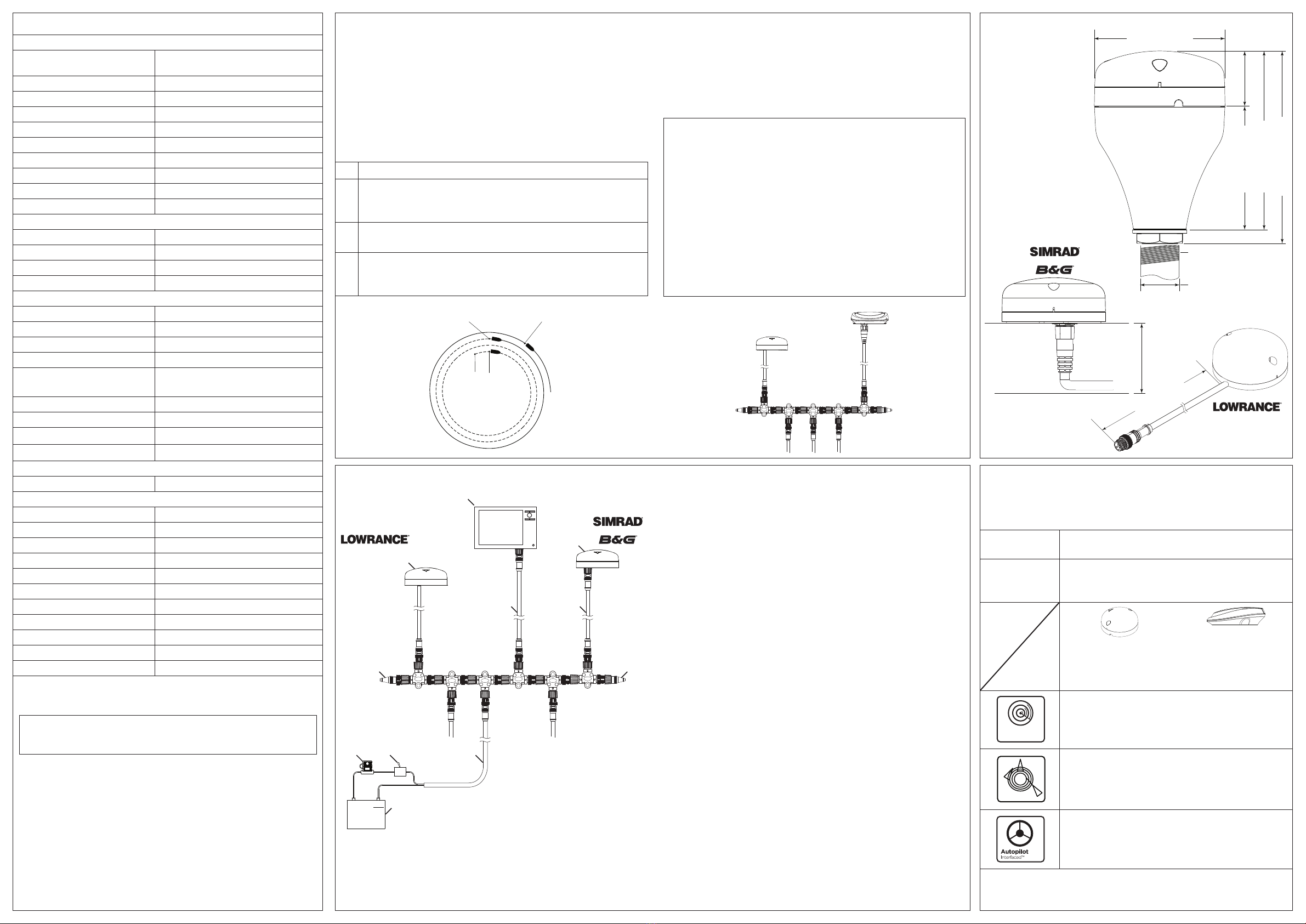
38 mm
(1.50")
90 mm (3.54")
25.4 mm (1.00")
14 Threads per inch
85 mm (3.35")
132.5 mm (5.22")
123 mm (4.84")
Dimensions
Connection
120
120
+
12 V DC
B
C
D
EF
G H I
A
D
J
1.22 m (4 ft)
Specications
General
Receiver type L1, C/A code, 1.575 GHz frequency/L2 C/A
code, 1.602 GHz frequency
Channels 32 channels
Position update rate Up to 10 Hz (1,5,10)
Horizontal accuracy 3 m (9.8 ft)
Heading accuracy +/- 3°
Rate of turn accuracy +/- 3°
Roll/Pitch accuracy at 30° +/- 1°
Cold start 50 sec
Start-up time 3 sec
Satellite reacquisition 5 sec
Environmental
Operating temperature -25° C to +60° C (-13° F to +140° F)
Storage temperature -40° C to +85° C (-40° F to +185° F)
Splash proof IPX7
Humidity 40° C, 93% RH, operating
Electrical
Input voltage 9 V DC - 18 V DC
Reverse polarity protection Yes
Power consumption < than 2 W
Current consumption < 100 mA at 12 V DC
Dimensions 90 mm (diam) x 38 mm (height)
3.54” (diam) x 1.50”(height)
Weight 0.14 Kg (0.3 lbs) aprox
Power/Data cable NMEA 2000® thru NMEA 2000® network
Antenna connector NMEA 2000® Micro C
Mounting Flush mount / Standard pole mount
Communications
Data I/O Protocol NMEA 2000®
NMEA 2000® PGNs
PGN Number PGN Title
126992 System time
129025 Position, Rapid update
129026 COG & SOG RU
129029 Position data
129539 GNS DOP
129540 GNS Satellites in view
127258 Magnetic variation
127250 Compass heading (Vessel heading)
127251 Rate of turn
127257 Attitude
Compliance Statements
WARNING: The user is cautioned that any changes or modifications not expressly
approved by the part responsible for compliance would void the user’s authority
to operate the equipment.
Navico declare under our sole responsibility that the product conforms with the
requirements of:
• Comply with CE under RED 2014/53/EU Directive.
• Comply with the requirements of level 2 devices of the Radiocommunications
(Electromagnetic Compatibility) standard 2017.
The relevant Declaration of Conformity is available in the following website under
model documentation section:
www.lowrance.com, www.simrad-yachting.com, www.bandg.com
®Reg. U.S. Pat. & Tm. Off, and ™ common law marks. Visit www.navico.com/intellectual-
property to review the global trademark rights and accreditations for Navico Holding
AS and other entities.
AMultifunction display
BLowrance® Point -1 or Baja has molded cable 1.2 m (4 ft)
CSimrad® GS25 or B&G® ZG100 : Requires NMEA 2000® Drop cable (D)
DNMEA 2000® drop cable max length 4.55 m (15 ft)
E120 Ohm Terminator (male)
F120 Ohm Terminator (female)
GFuse (5 Amp)
HSwitch
INMEA 2000® Power cable 1.8 m (6 ft)
J12 V DC Power supply
60 mm
(2.36 “)
Heading sensor calibration
The built in heading sensor will need to be calibrated before use
to compensate for local magnetic fields on your vessel for accurate
chart with radar overlay.
Auto Calibrate mode
Before the heading sensor calibration is started, make sure that
there is enough open water around for the vessel to make multiple
full turns. The calibration should be done in calm sea conditions
and with minimal wind to obtain best results.
ADisconnect then reconnect the sensors NMEA 2000® cable.
BMake two consecutive turns of 360 degrees. The completion
of these two turns automatically activates the Auto Calibration
procedure.
CContinue with a smooth third turn and a quarter (of at least 390
degrees) within 2 to 5 minutes, to complete the calibration.
DCalibration should be complete. If the time is outside the limits,
the calibration is void and the radar overlay may not appear
accurate on your chart. Repeat steps A-D if calibration fails.
AB
CD
Calibration from a Multifunction display
Calibration can be performed from a compatible Multifunction
display, instrument display or autopilot controller. For more
information, refer to the documentation for your display unit.
Multiple heading sensors on the network
WARNING: Point-1 is a heading sensor and GPS antenna. By
default, Point-1 is a heading sensor if there are no other heading
sensors on the network. If there are two Point-1 units on the
network, only one can be a heading sensor, the other will function
as a GPS antenna. In this case, the Point-1 unit that is used as the
heading sensor must be set to instance ‘1’.
If there is a Point-1 unit and another heading sensor on the
network, such as Precison-9, the latter would be the heading
sensor by default.
If you have multiple Simrad® GS25 or B&G® ZG100 heading
sensors on the network, your MFD will only receive data from the
heading sensor set as the compass source in the system.
120
120
Heading sensor application
This sensor includes an electronic heading sensor to provide chart
stabilization, course over ground at low speeds, and overlay of
radar on charts.
Acceptable performance for the application.
A rate stabilized heading sensor such as
Precision-9 will provide the most robust
performance for demanding applications.
Point-1
GS25
ZG100
Precision-9 compass
Radar Overlay
MARPA










































