maxon motor control ADS_E 50/5
Order number 166143
Operating Instructions June 1999 edition
The ADS_E 50/5 is a powerful servo-
amplifier for driving permanent magnet
DC motors up to 250 Watts.
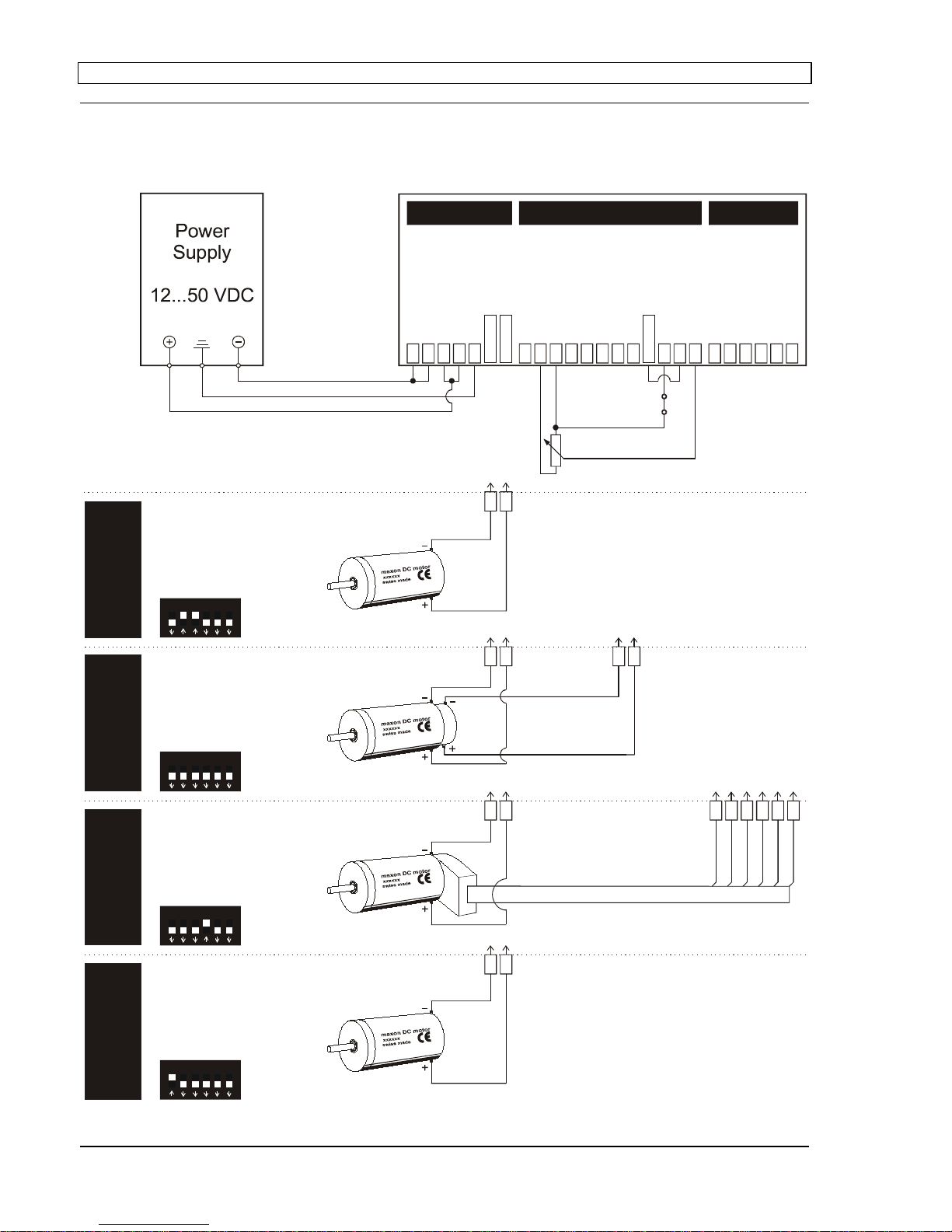
Four modes can be selected by
DIP switches on the board:
•Speed control using tacho signals
•Speed control using encoder signals
•I x R compensated speed control
•Torque or current control
The ADS_E 50/5 is protected against
excess current, excess temperature and
short circuit on the motor winding.
With the FET power transistors incorpo-
rated in the servoamplifier, an efficiency of
up to 95% is achieved.
A built in motor choke combined with the
high PWM frequency of 50 kHz allows the
connection of motors with a very low
inductivity.
In most cases an external choke can be
omitted.
Thanks to the wide input power supply range of 12 - 50 VDC, the ADS_E 50/5 is very versatile and can be used
with various power supplies.
The Europa card size allows the unit to be installed in a 19“-subrack or in a plug-in card system. Thanks to the
controller circuit design, the ADS_E 50/5 is easily and quickly installed.
Table of Contents
1 Safety Instructions.............................................................................................................................................2
2 Performance Data..............................................................................................................................................3
3 Minimum External Wiring for Different Modes of Operation ..............................................................................4
4 Operating Instructions........................................................................................................................................5
5 Functions ...........................................................................................................................................................7
6 Additional Possible Adjustments......................................................................................................................10
7 Error Handling..................................................................................................................................................11
8 Block Circuit Diagram......................................................................................................................................12
9 Pin Allocation Connector DIN 41612 Version H7/F24...................................................................................12
10 Dimension Drawing..........................................................................................................................................13
11 Accessories (not part of delivery) ...................................................................................................................13
The latest edition of this operating instructions may also be found in the internet under
http://www.maxonmotor.com («Downloads» in the category «Service & Support»).