MiR100 UR Interface Technical Documentation
Copyright Mobile Industrial Robots 2016 Page 3 of 17
Table of contents
1Introduction......................................................................................................................................................4
2Connecting MiR100 and UR Robot...................................................................................................................4
2.1 Preconditions............................................................................................................................................4
2.2 Connecting MiR100 to the UR robot ........................................................................................................4
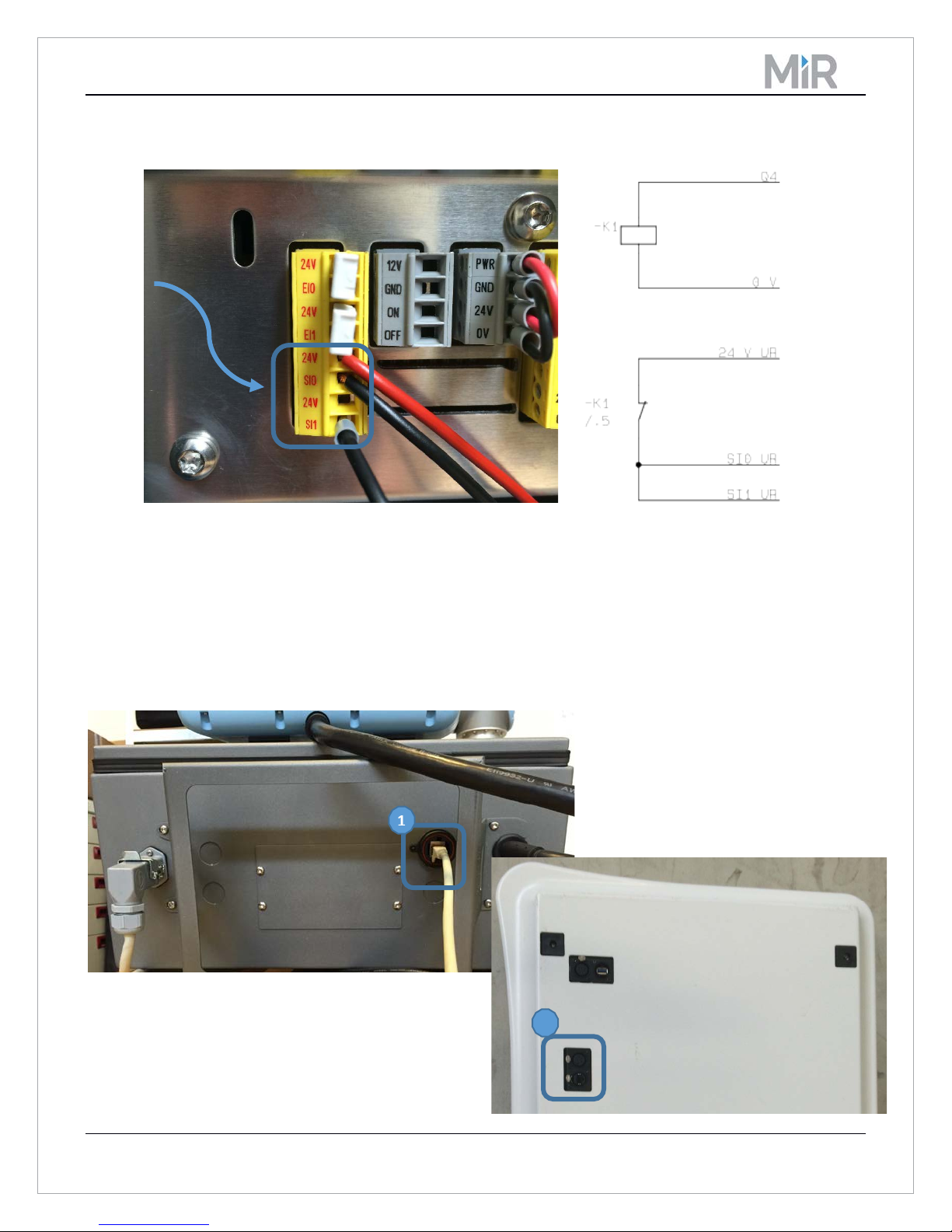
2.3 Safety connections ...................................................................................................................................5
2.4 Connecting the Ethernet cable.................................................................................................................6
3Handling the application ..................................................................................................................................7
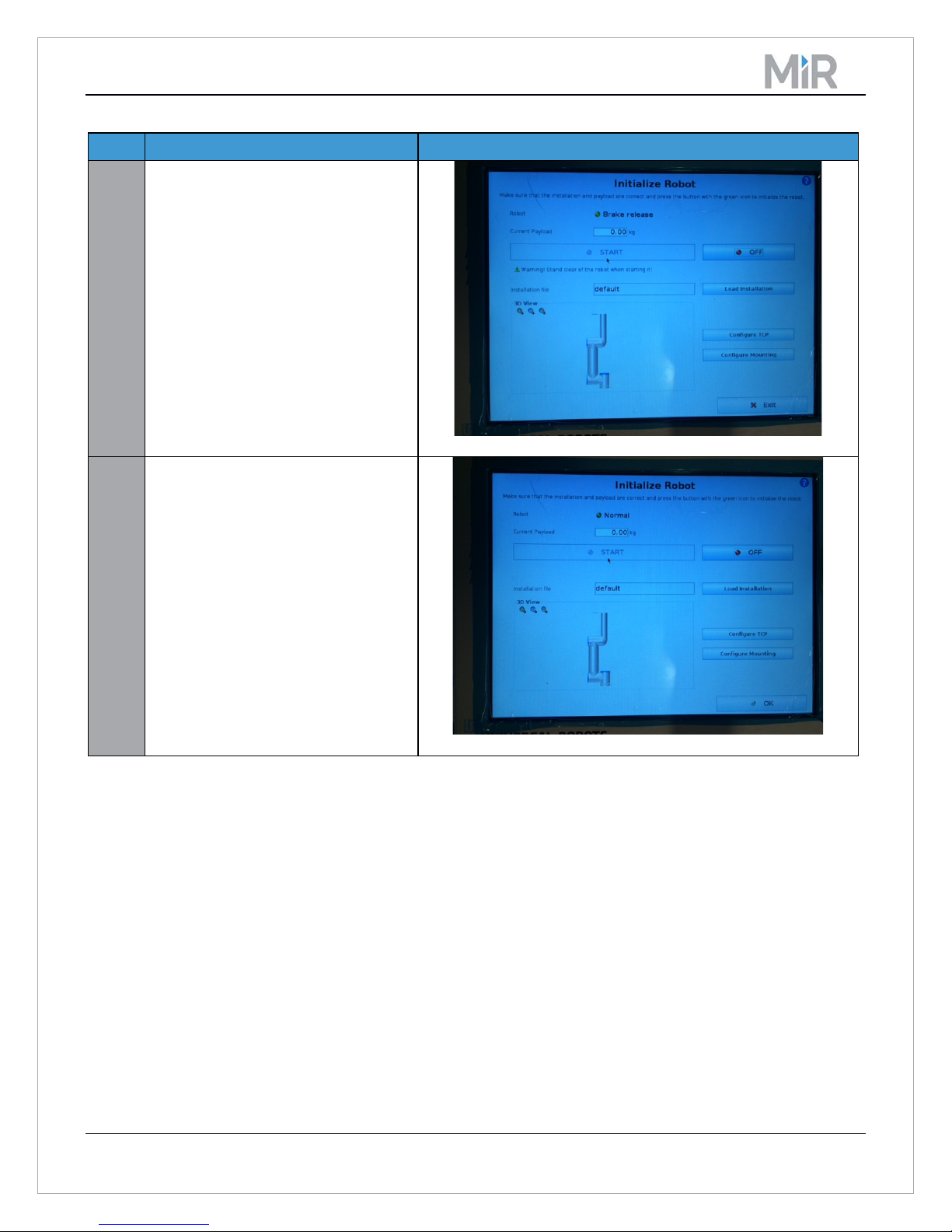
3.1 Starting the robot .....................................................................................................................................7
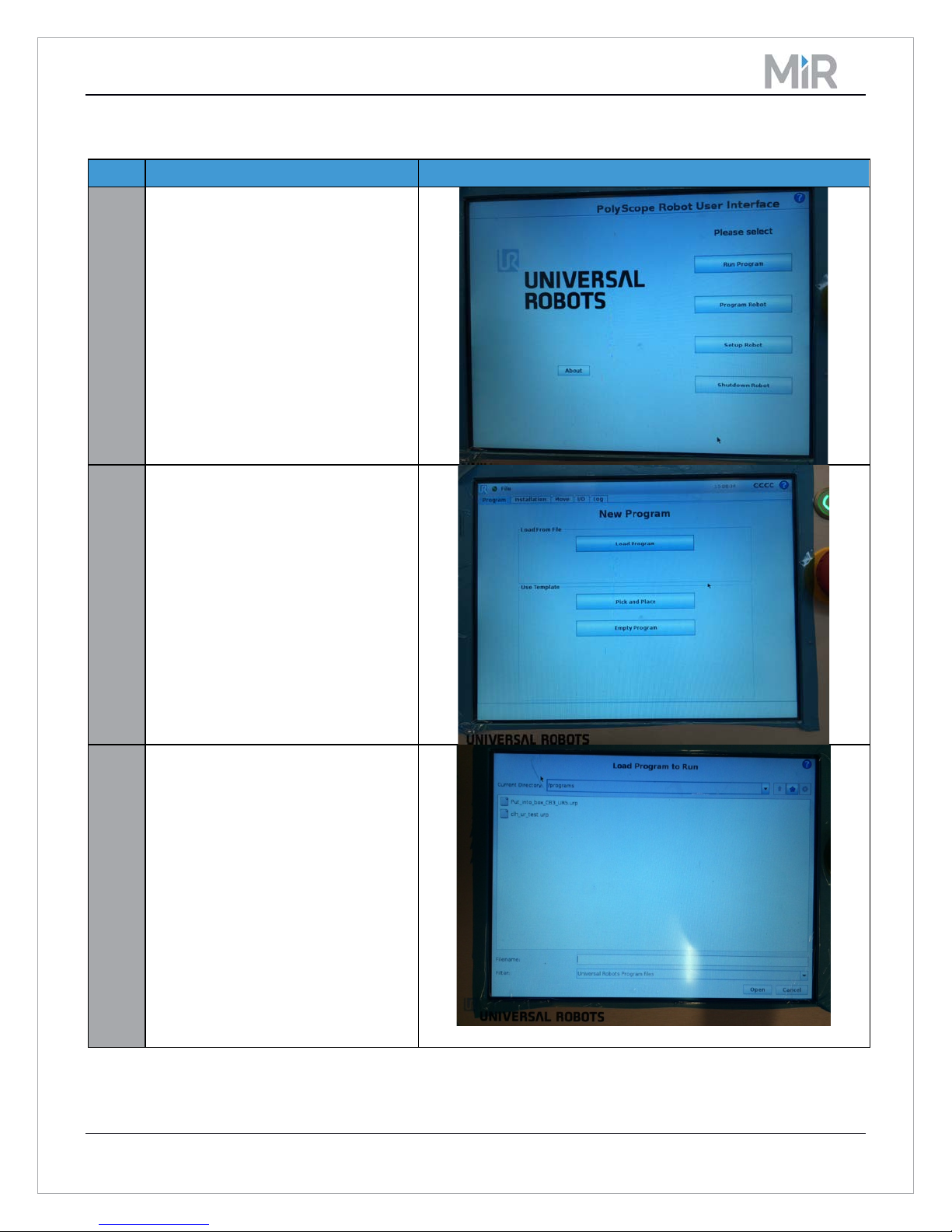
3.2 Creating a new program...........................................................................................................................9
3.3 Loading robot program...........................................................................................................................10
3.4 Network settings ....................................................................................................................................13
3.5 Shutting down the robot ........................................................................................................................13
4Using a Universal Robot with MiR..................................................................................................................14
4.1 Enabling Universal Robot features .........................................................................................................14
4.2 Connecting to Universal Robot...............................................................................................................15
4.3 Create mission with Universal Robot actions.........................................................................................16
4.4 Preparing the Universal Robot before use .............................................................................................16
5Frequently Asked Questions...........................................................................................................................17
6Changelog .......................................................................................................................................................17