Mode Description Applications
Timespan The device will accumulate vehicles or
people counting over a certain time.
Then the counter values will be
transmitted over the LoRaWAN Network.
Time period is defined by the LoRaWAN
Uplink Interval Setting.
Most
Applications
use this mode
NotZero Same as Timespan Mode, but the
uplinks will be skipped if there is no
count during the Uplink Interval Period.
The setting can be used to reduce
uplinks for LoRaWAN networks with
limited number of allowed
uplinks/downlinks per day. As the radar
is the largest contributor to energy
consumption, this setting will not have a
noticeable energy saving effect.
Reducing
uplinks
Trigger Sends an uplink immediately when an
object is detected. Unfortunately, the
LoRaWAN standard does not allow
uplinks to be sent in succession at any
speed. Instead, the duty cycle must be
observed. This also applies to this
mode. This means that a trigger is only
executed immediately if there was a
sufficiently long waiting time without
counts beforehand (something like 3
minutes).
Train
detection
Security
Applications
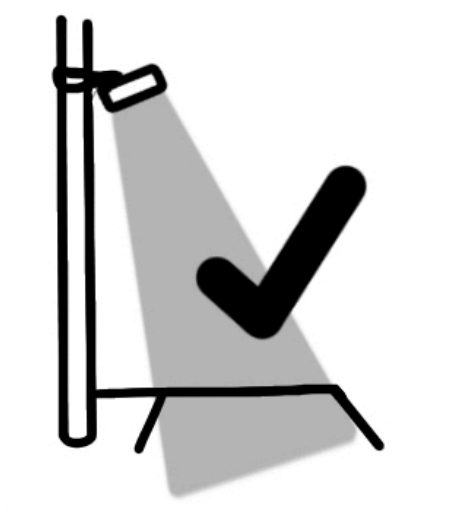
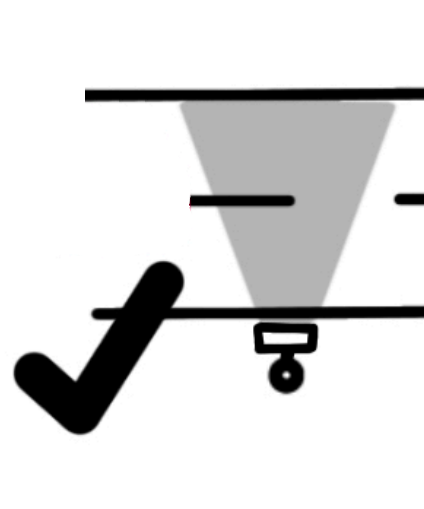
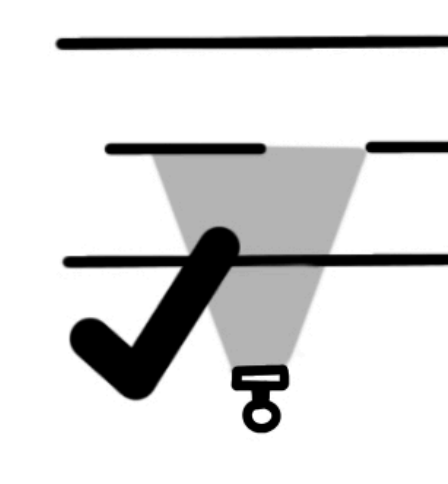
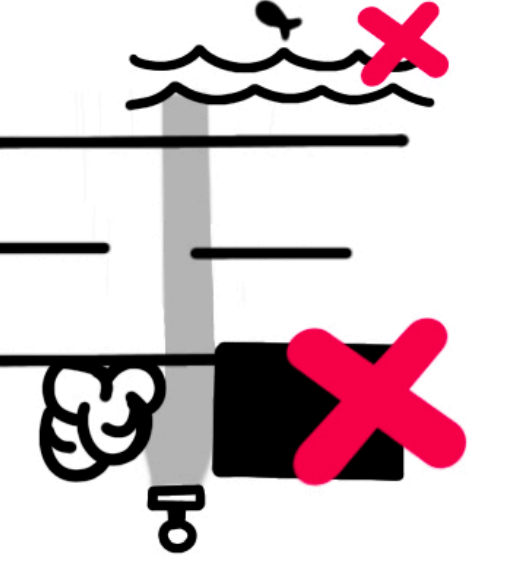
Hold-Off
The hold-off function has been introduced to the device firmware to be able to count
connected vehicles (trains, trailers) as one instead of multiple counts.
Hold-off is enabled by entering a value bigger than zero.
As an example: If Hold-off time is set to 10 seconds the device will increase the
counters as soon as an object has been detected. Then the radar will be off for 10s
.
Value range: 1-600s (0 = disabled).
Default: 0




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}