Now, press the “Start calibration” button and the program will send measurement string to
photorobot and will start. At the beginning of the test, the head will be a few seconds in sleep mode
and then start. The head will mo e to the right according to panorama settings and then stop for a
little longer, so we can read the angle (angle End R) and consequently return back by mo ing to the
left. During the left and right mo ements, the head makes pauses according to set number of
pictures of adjusted in panorama.
The angles, reading on the head protractor will be entered to the fields in the program. First, the
angle where the head is stopped when mo ing to the right - End R angle and then the angle at which
the head stoped after the left motion - End L angle. If the head will pass 360 degrees angel, type
this alue into the program field (f.e. 15°) and check “ o er 360” box. The same we do, if the head
mo es in re erse motion through the 0 ° mark and stop f.e. at 355 °. In the program, type angle
355 ° and check "below 360" box.
If your head MP101 has not enought accurate protractor to read the angles of mo ements, you
can isit our website www.photo-jinn.com - Customer support section, where you can find
instructions , how to easily replace the original protractor by more accurate one.
Entering of the start angel Entering of the EndR and EndL angles
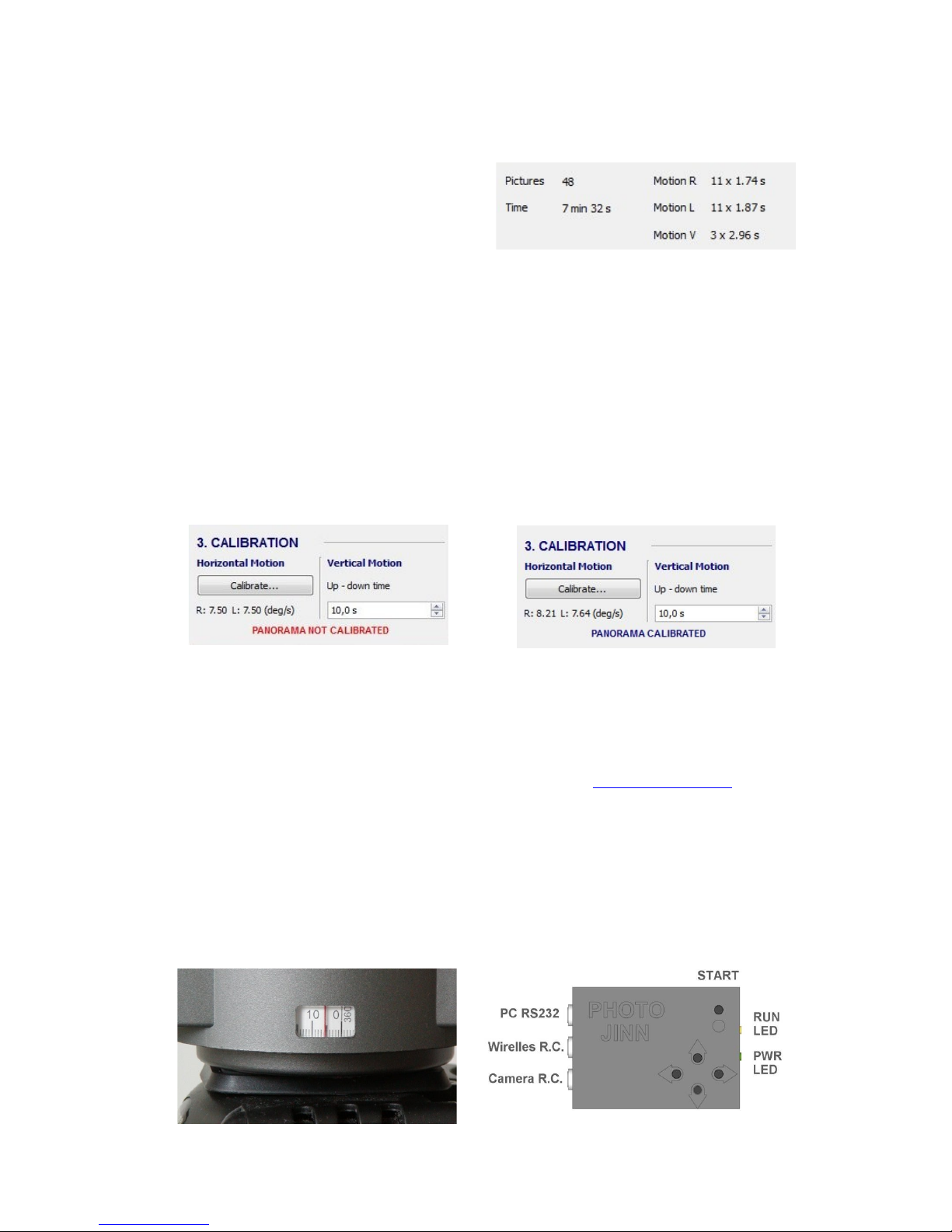
Finally, click on the "Finish calibration" button and the program returns to the main window. From
entered angles when calibrating, the program will calculate new - corrected panorama data and the
notice of the panorama state will change from red note "PANORAMA NOT CALIBRATED" to the
blue note "PANORAMA CALIBRATED.
The cali ration of vertical motion
As head MP101 has not any protractor scale for the ertical motion, we will calibrate the motion in
ertical direction by measuring of time we need for the head motion from one extreme position to
another. According to the de ice maker, this angle is 30 degrees.
The calibration process is following : the head will be tilt to the extreme position by pushing the (up/
down) button on the adapter. (if we hold the button little bit longer the head will be stopped in
extreme position)
Take the stopwatch and measure the time taken by the head mo es from one extreme position to
another. This alue is then inserted into the Photo-Jinn program in PC - into the "Up - down time“
field. (Informati e alue of this time is about 10s for 6V power source and about 15s for power supply
from NiMH batteries.)
By this, the head is calibrated (for horizontal and ertical motion) and with the adjusted calibration
alues, the program will calculate all panorama details.Now you can sa e the calibrated panorama
into your computer (SAVE button), but mainly it must be loaded into the Photo-Jinn adapter (SEND
button), otherwise the head will still perform only the calibration program - which we sent to it last
and which is sa ed in adapter memory.