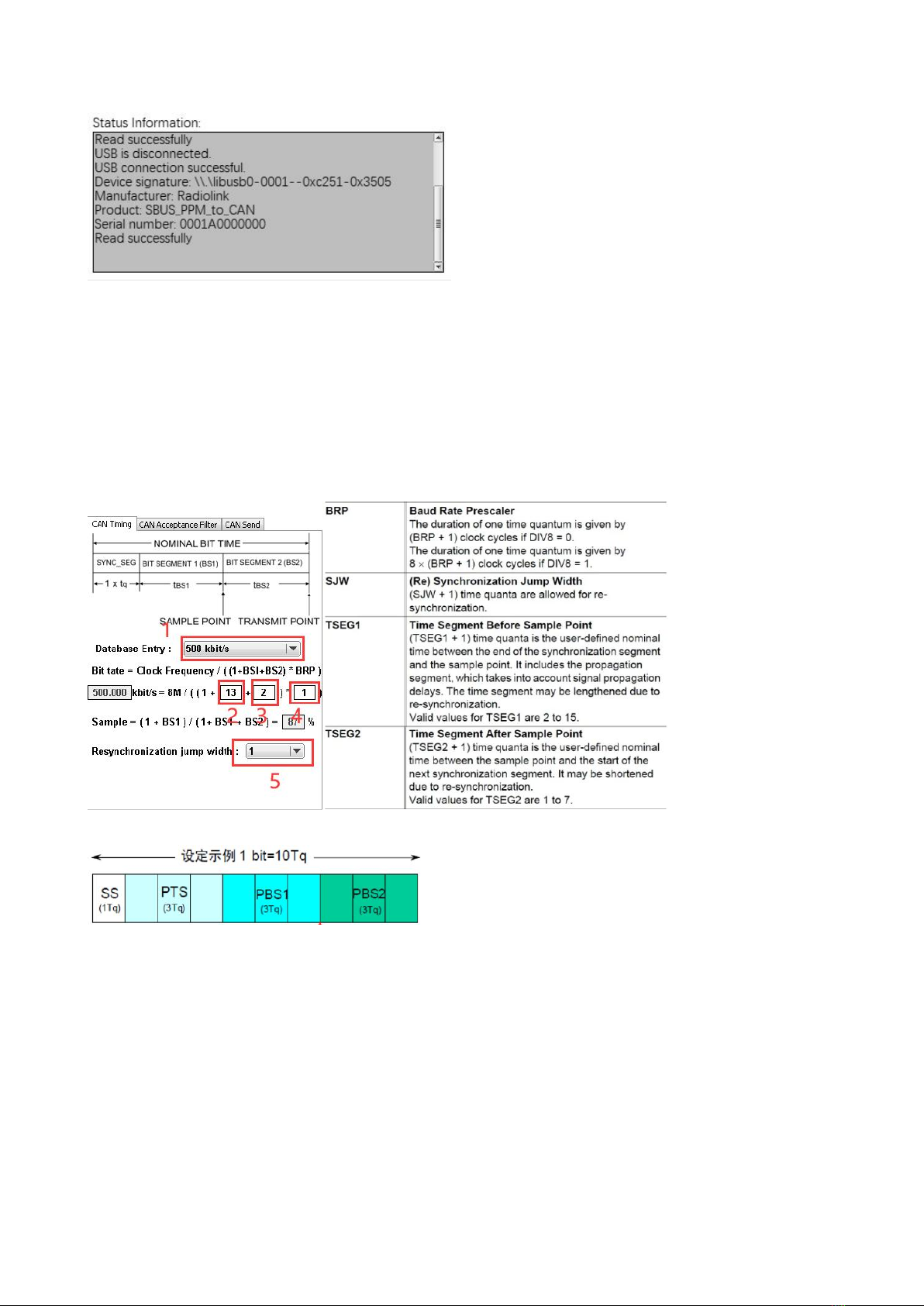
Note:
①The synchronization segment is always 1.
②PTS and BS1 have been merged, so the width of BS1 is equal to the width of PTS+BS1.
③Sample: Automatically calculate sampling points according to BS1 and BS2.
Configuration references:
https://blog.csdn.net/piaolingyekong/article/details/124276670
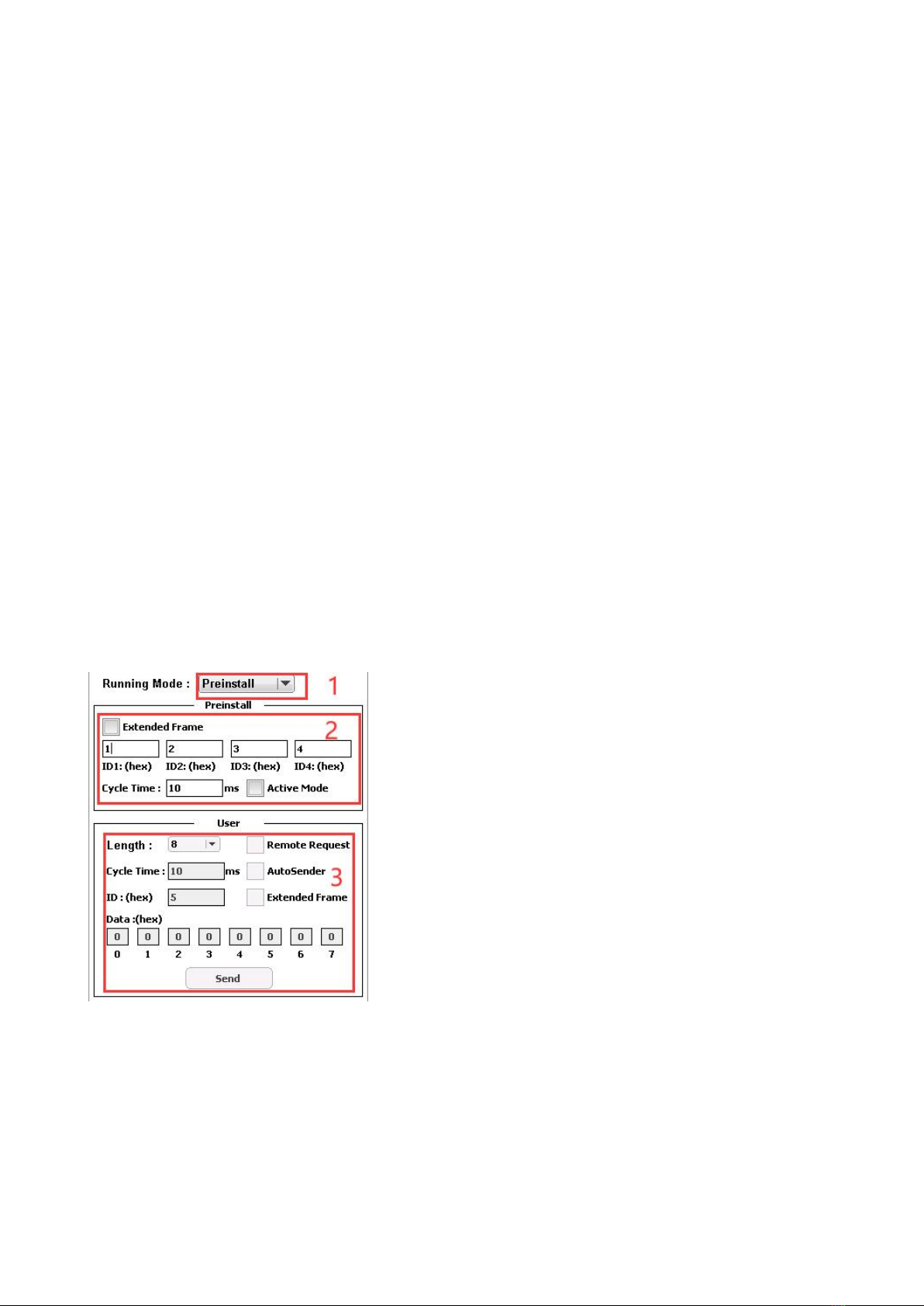
(2) CAN Acceptance Filter
①Running Mode
1. Preinstall: Only receive data matching the 5 IDs of the preset configuration.
(1) Respond after receiving Get 32byte ID, and then send 32 data continuously.
(16 channels, 2 bytes per channel)
(2) Respond after receiving Get 8byte_1 ID, and send 8 data.
(1-4 channels, 2 bytes per channel)
(3) Respond after receiving Get 8byte_2 ID, and send 8 data.
(5-8 channels, 2 bytes per channel)
(4) Respond after receiving the Get 8byte_3 ID, and send 8 data.
(9-12 channels, 2 bytes per channel)
(5) Respond after receiving Get 8byte_4 ID, and send 8 data.
(13-16 channels, 2 bytes per channel)
2. User: Receive data according to the configuration of (match ID) and (mask ID). Only reply.
No additional data is sent.
3. Silent: The working mode ID data before selecting the Silent mode can be received, but it
will not send a response signal.
Note: Only remote frame data is received in this mode.
②ID Mode:
(1) Standard(Standard ID) , with ID range of 0-7FF
(2) Extended(Extended ID), with ID range of 0-1FFFFFFF