1DAFTAR ISI
1 DAFTAR ISI.................................................................................................................................. 2
2 INTRODUCTION ..........................................................................................................................4
2.1 About this Documentation.................................................................................................4
2.2 Document Organization ..................................................................................................... 4
3 GENERAL INFORMATION............................................................................................................5
3.1 Description .........................................................................................................................5
3.2 Operating Environment...................................................................................................... 5
3.3 Specifications .....................................................................................................................5
4 EQUIPMENT GUIDE ....................................................................................................................7
4.1 Description .........................................................................................................................7
4.2 System Components .......................................................................................................... 7
4.2.1 Geomar....................................................................................................................... 7
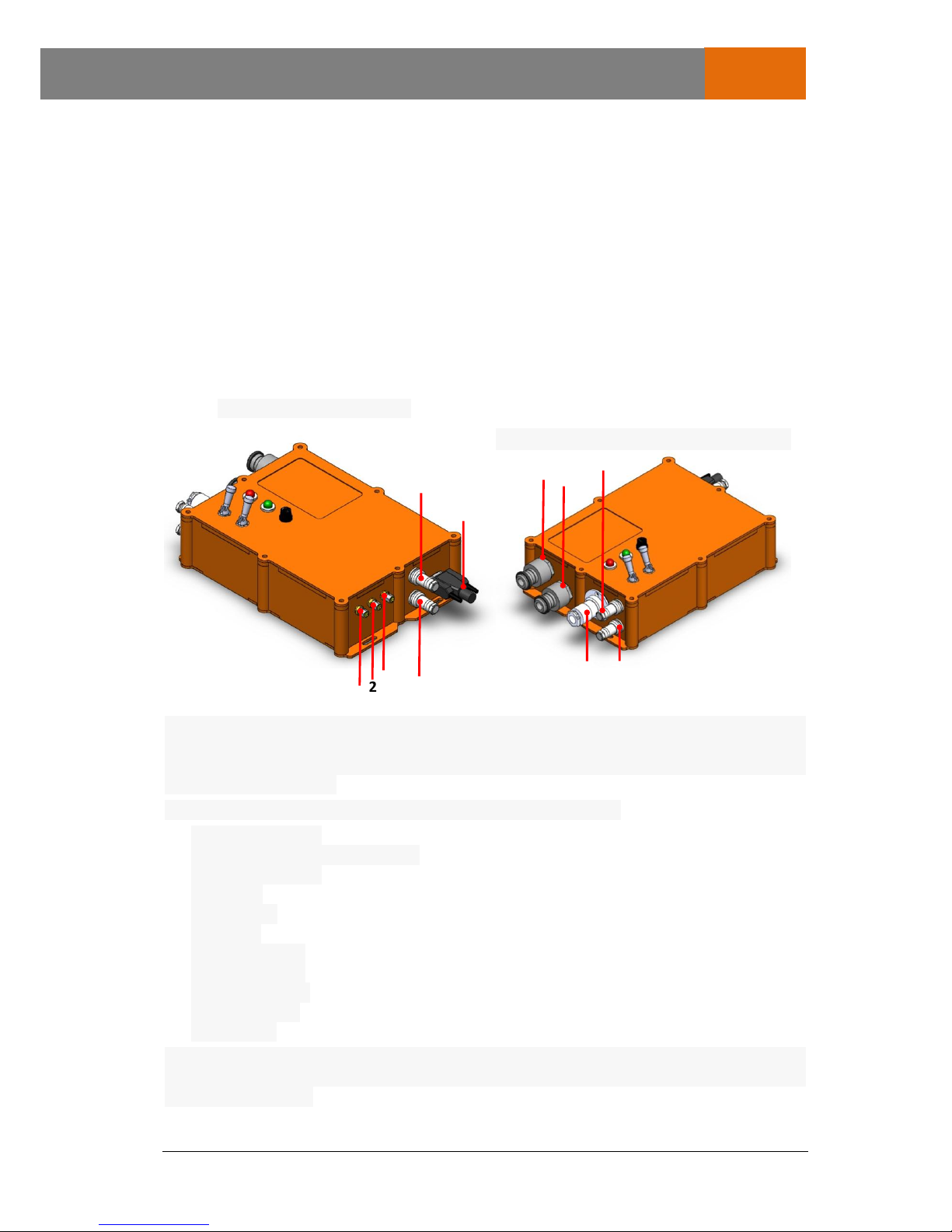
4.2.2 Ground station............................................................................................................8
4.2.3 Remote Control ..........................................................................................................8
4.3 Geomar Boat ......................................................................................................................9
4.3.1 Propulsion ................................................................................................................10
4.3.2 Navigation System....................................................................................................10
4.3.3 Sonar ........................................................................................................................11
4.4 Remote Control ................................................................................................................12
4.5 Ground Stasion.................................................................................................................13
5 GM-MON GUIDE.......................................................................................................................14
5.1 Description .......................................................................................................................14
5.2 Window Control ...............................................................................................................14
5.3 Menu bar..........................................................................................................................15
5.3.1 File ............................................................................................................................15
5.3.2 Route ........................................................................................................................17
5.3.3 USV ...........................................................................................................................17
5.4 Geomar Track Window.....................................................................................................18
5.5 Instruments ......................................................................................................................19
5.6 Status Pane....................................................................................................................... 20
6 OPERATION GUIDE ...................................................................................................................21
6.1 Description .......................................................................................................................21
6.2 Safety First........................................................................................................................21