ROWAN ELETTRONICA SRL page 2 out of 24
INDEX
Boarddescription:
Technical characteristics - Dimensions............................................................................................page. 3
Operating principal .............................................................................................................................page. 4
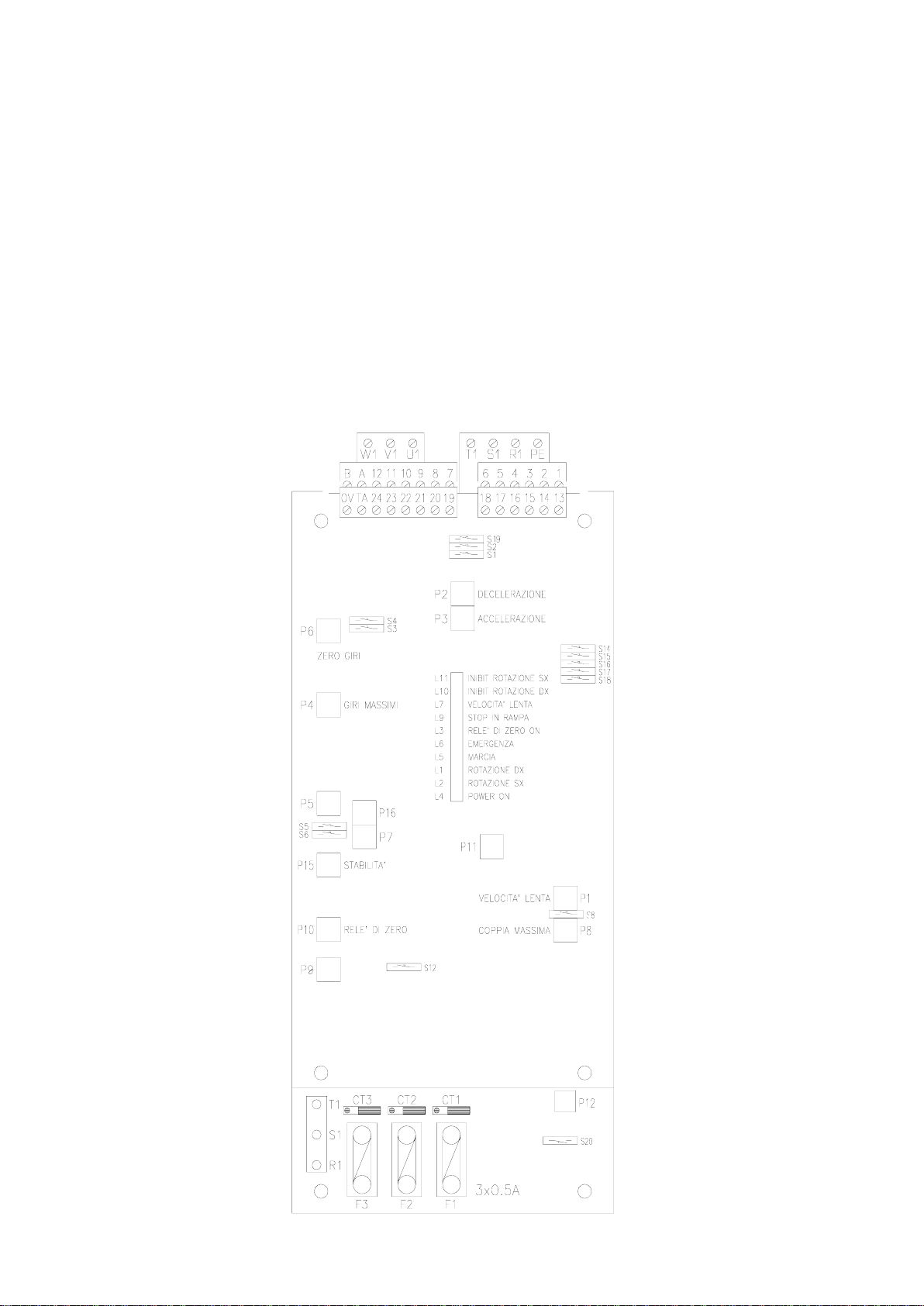
Led,trimmer, dip-switchpositions.................................. .....................................................................page. 4
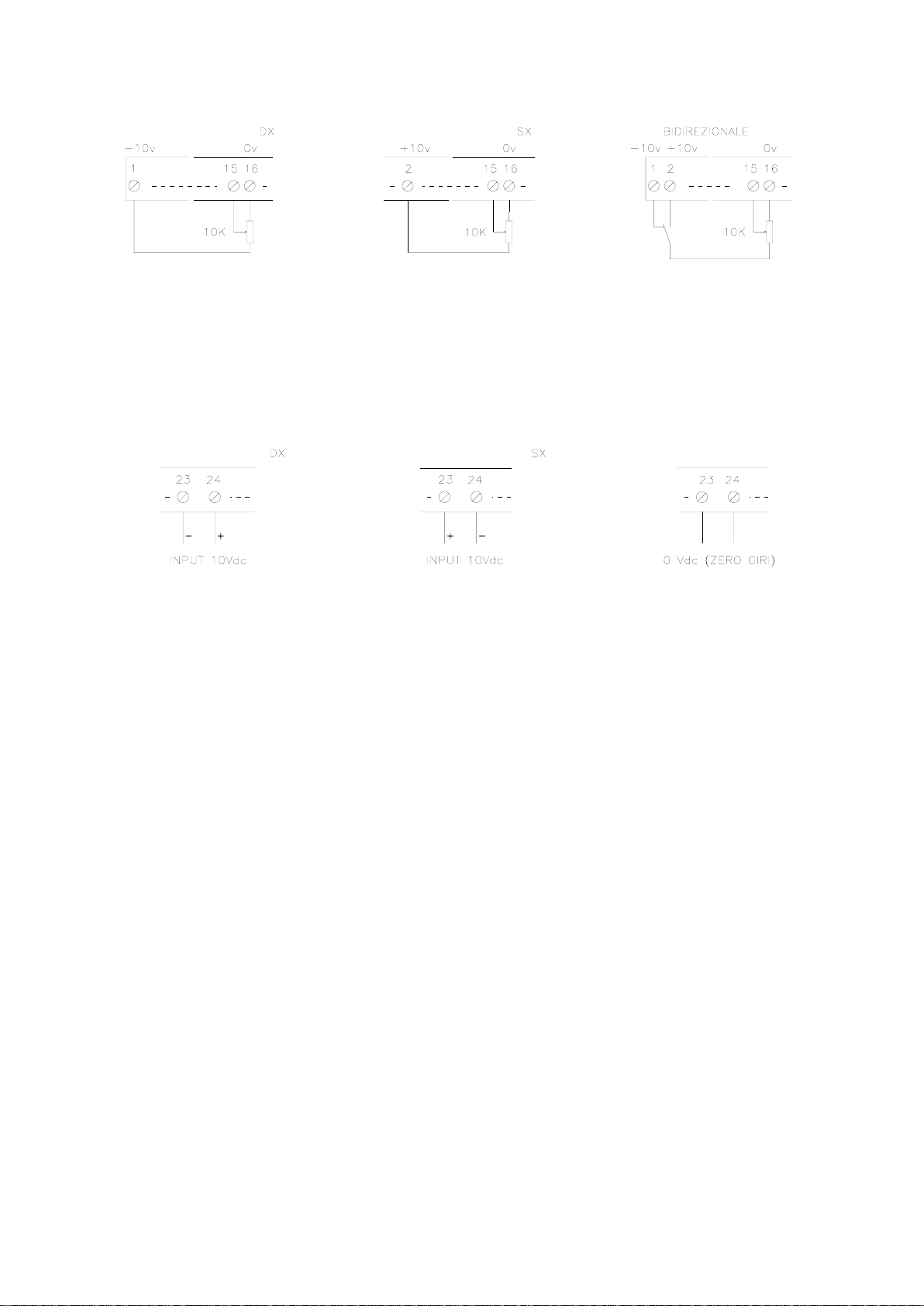
Connection diagrams.........................................................................................................................page. 5
Led signal description ........................................................................................................................page. 6
Trimmer description ...........................................................................................................................page. 6
Dip-switch description ........................................................................................................................page. 6
Command and power connectors description .................................................................................page. 7
380S board setting and command instructions:
Board presetting for the number of motor poles ...............................................................................page. 8
Maximum speed setting - zero revolutions offset ..............................................................................page. 8
Acceleration and deceleration ramp regulation ................................................................................ page. 8
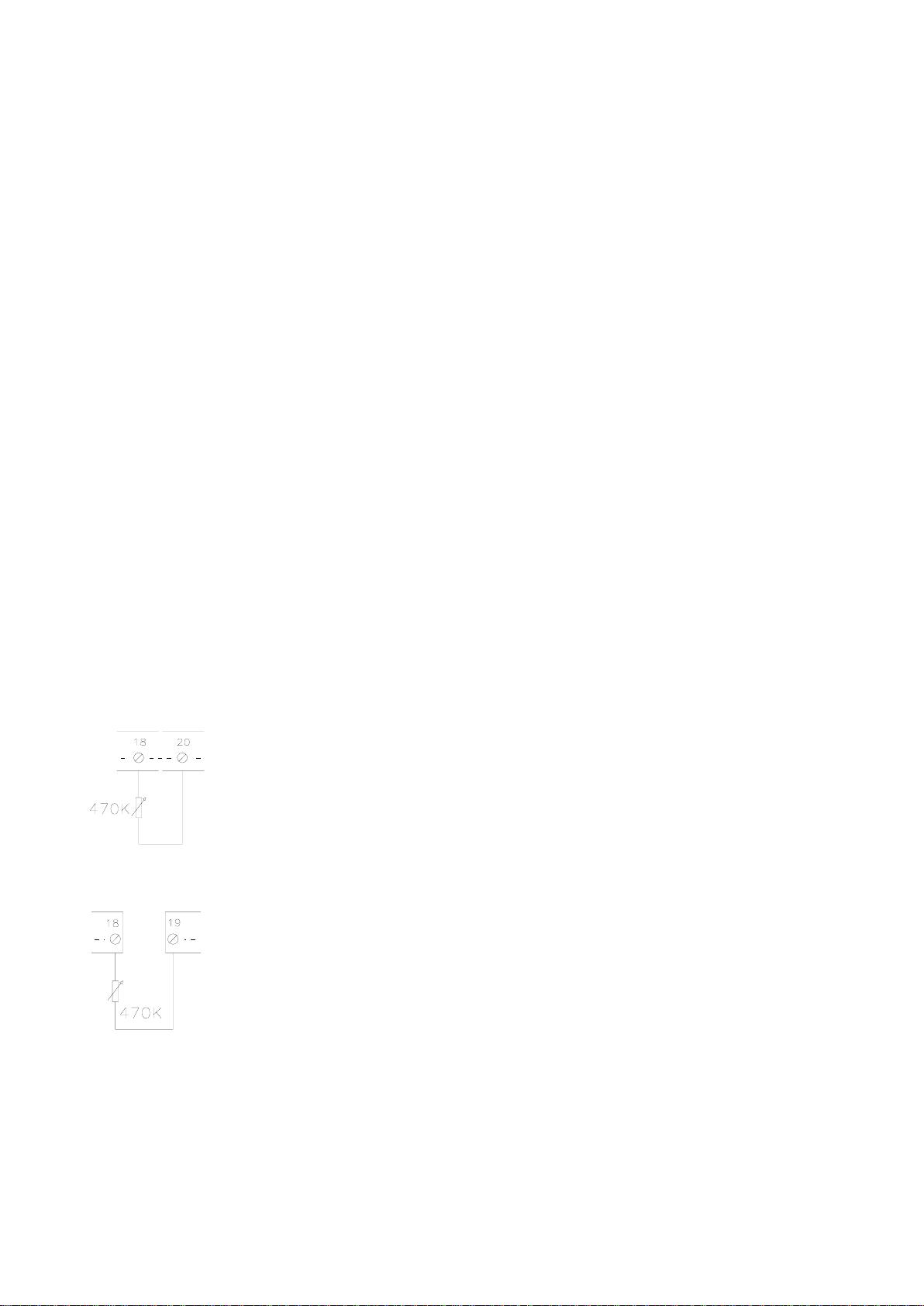
DC signal or potentiometer speed regulation................................................................................... page. 9
Rowan high speed motor couple regulation..................................................................................... page. 10
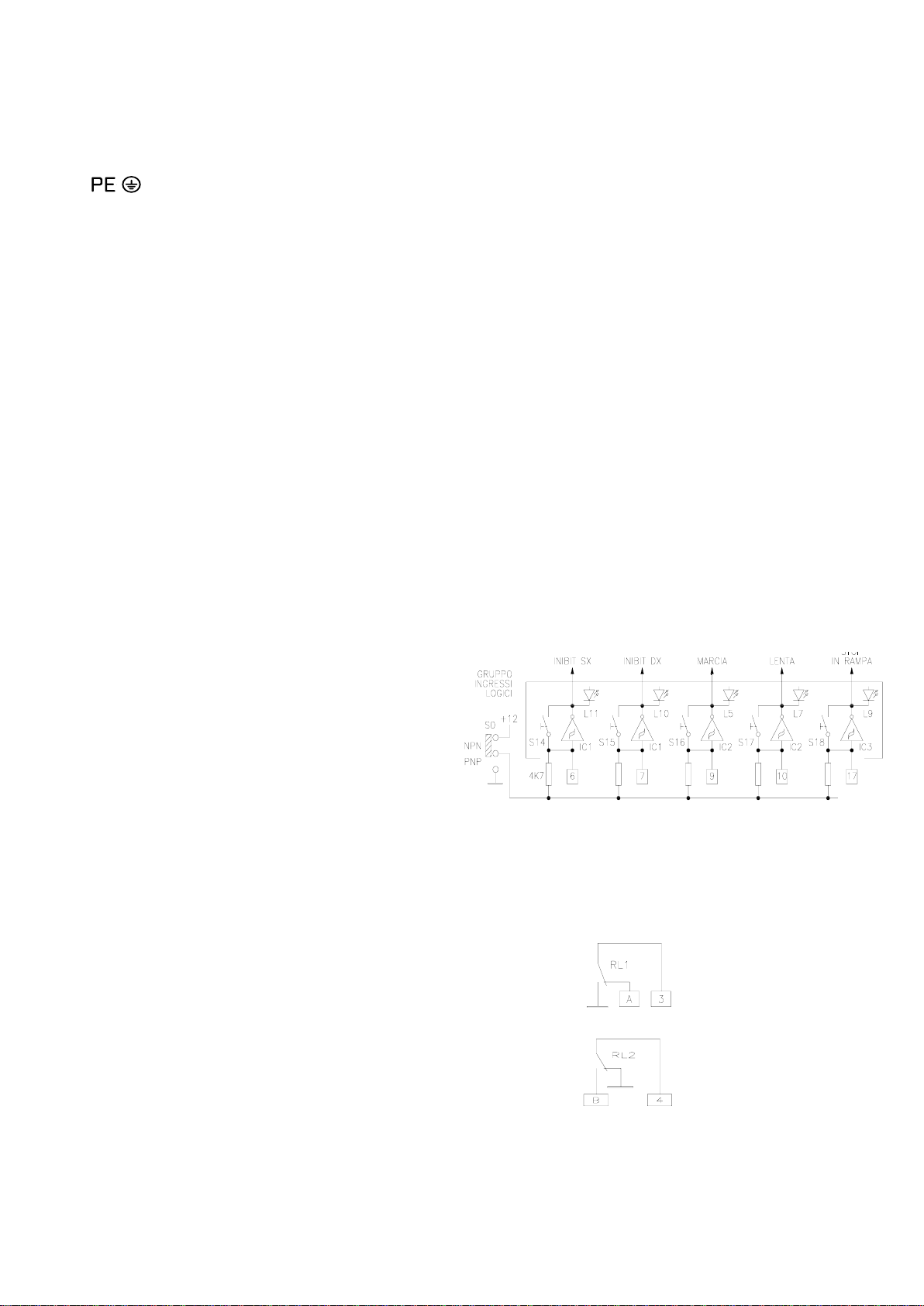
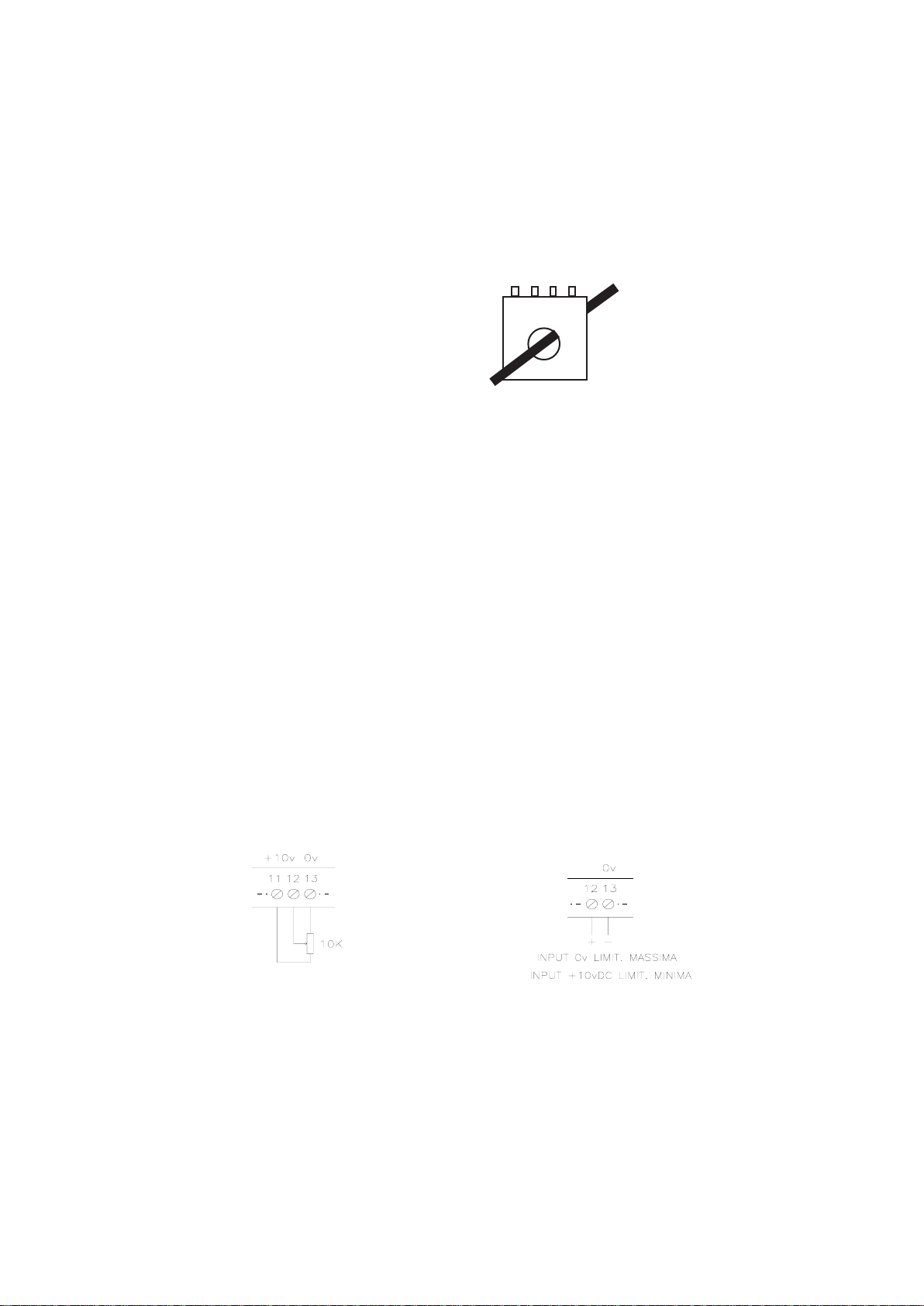
Command inputs description ............................................................................................................page. 11-12
Output description ..............................................................................................................................page. 13
Rowan S series motor connection instructions:
Motor power connector connection ....................................................................................................page. 14
Electrical characteristics table of the motors applicable to the 380S board...................................page. 14
Motor service connector connection...................................................................................................page. 15
Brake connection; table of the power consumption of the 24VDC brake......................................... page. 15
Installationinstructions:
Mechanical installation .......................................................................................................................page. 16
Electrical protection ............................................................................................................................page. 16
Wiring and electromagnetic compatibility..........................................................................................page. 16
Start up ................................................................................................................................................page. 17-18
Troubleshooting..................................................................................................................................page. 18
Default settings and standard settings .............................................................................................page. 18
Applicable diagrams:
Forward/backward movement with pre-stop slowing for precise stopping with the brake command.. page. 19
How to substitute the previous (out of production) boards:
Substitution of Cod. 280S.B/0 and 280R with Cod. 380S................................................................page. 5
Block diagrams .................................................................................................................................. page. 20
Componentslayout............................................................................................................................ page. 21
Maintenance instructions for the S series Rowan motors (high slip type) ................................. page. 22-23
TRANSLATION OF THE TEXT IN THE DRAWINGS ........................................................................pag. 24
Warning!
- ROWAN ELETTRONICA s.r.l. declines any responsibility for any inaccuracies contained in this manual, due to
printing and/or transcription errors. ROWAN ELETTRONICA s.r.l. reserves the right to make any variations that
it considers necessary for better functioning of the product, without prior notification.
- Regarding the data and characteristics mentioned in the manual, a maximum tolerance of 10% has been
allowed, if not otherwise indicated.
- Theproductguarantyisconsideredex-worksandisvalid 6monthsfromthedateofleavingROWANELETTRONICA
s.r.l.
- The electrical equipment could create dangerous situations for the safety of both personnel and objects; the user
is responsible for the installation of the equipment and for the conformity of the installation with the regulations
in force.
- The diagrams contained in this manual are mere examples and should be perfected by the customer according
to their specific needs.
-The equipment must be installed only by qualified personnel, after having read and understood this manual. In
case of doubt, the supplier should be contacted.