AR100 Operation Manual
© 2018 Schmitt Industries Revision 1.1
Table of Contents
Safety Precautions..............................................................................................4
CE compliance....................................................................................................4
Laser safety.........................................................................................................4
General information............................................................................................4
Basic technical data ...........................................................................................5
Options to designate when ordering the AR100..............................................6
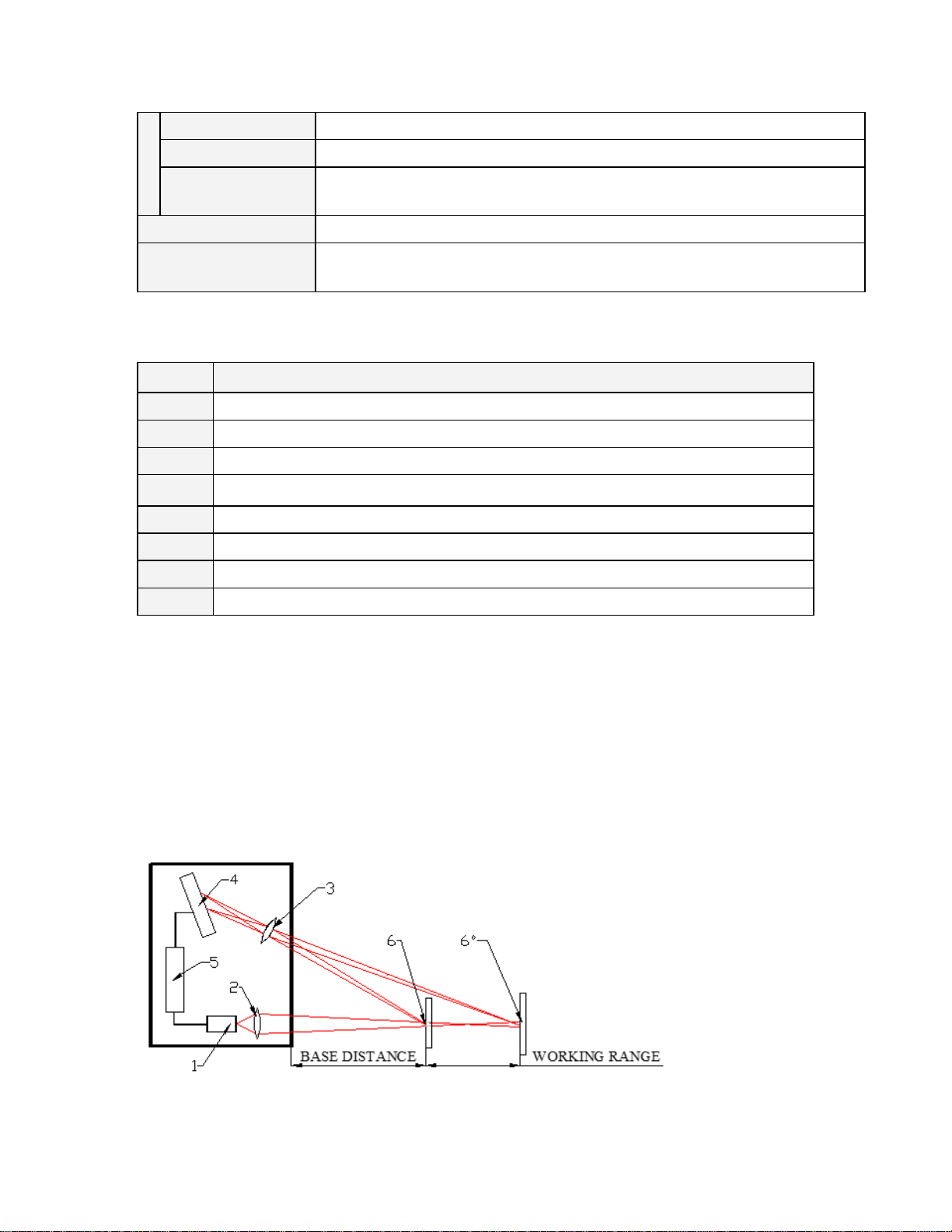
Structure and operational principle ..................................................................6
Dimensions and mounting.................................................................................7
Overall and mounting dimensions...........................................................................7
Overall demands for mounting.................................................................................7
Connection..........................................................................................................8
Configuration parameters..................................................................................8
Time limit for integration ..........................................................................................8
Sampling mode..........................................................................................................9
Sampling period ........................................................................................................9
Zero point.................................................................................................................10
Line AL operation mode .........................................................................................10
Time lock of the result ............................................................................................12
Method of results averaging...................................................................................12
Number of averaged values/time of averaging......................................................12
Factory parameters table........................................................................................12
Description of RS232 and RS485 interfaces...................................................13
RS232 port...............................................................................................................13
RS485 port...............................................................................................................13
Serial data transmission format.............................................................................13
Modes of data transfer............................................................................................13
Communication sessions types.............................................................................13
Configuration parameters.......................................................................................14
Rate of data transfer through serial port ................................................................14
Net address...........................................................................................................14
Factory parameters table.......................................................................................14
Acuity protocol (binary format)..............................................................................14
Request.................................................................................................................14
Answer ..................................................................................................................15
Data stream...........................................................................................................16
Output rate............................................................................................................16
Request code table................................................................................................16
Notes.....................................................................................................................18
Modbus RTU protocol (binary format)...................................................................22
Input Registers (Read only)...................................................................................22
Holding Registers (Read / Write)...........................................................................22
ASCII format ............................................................................................................23