Field Service Procedure – Replacement Level Cage Kit, 2406
Page3of9
Document No
137303 Rev A
Copyright © Sea Tel, Inc 2012 - The information contained in this document is proprietary to Sea
Tel, Inc. This document may not be reproduced or distributed in any form without prior written
consent of Sea Tel, Inc.
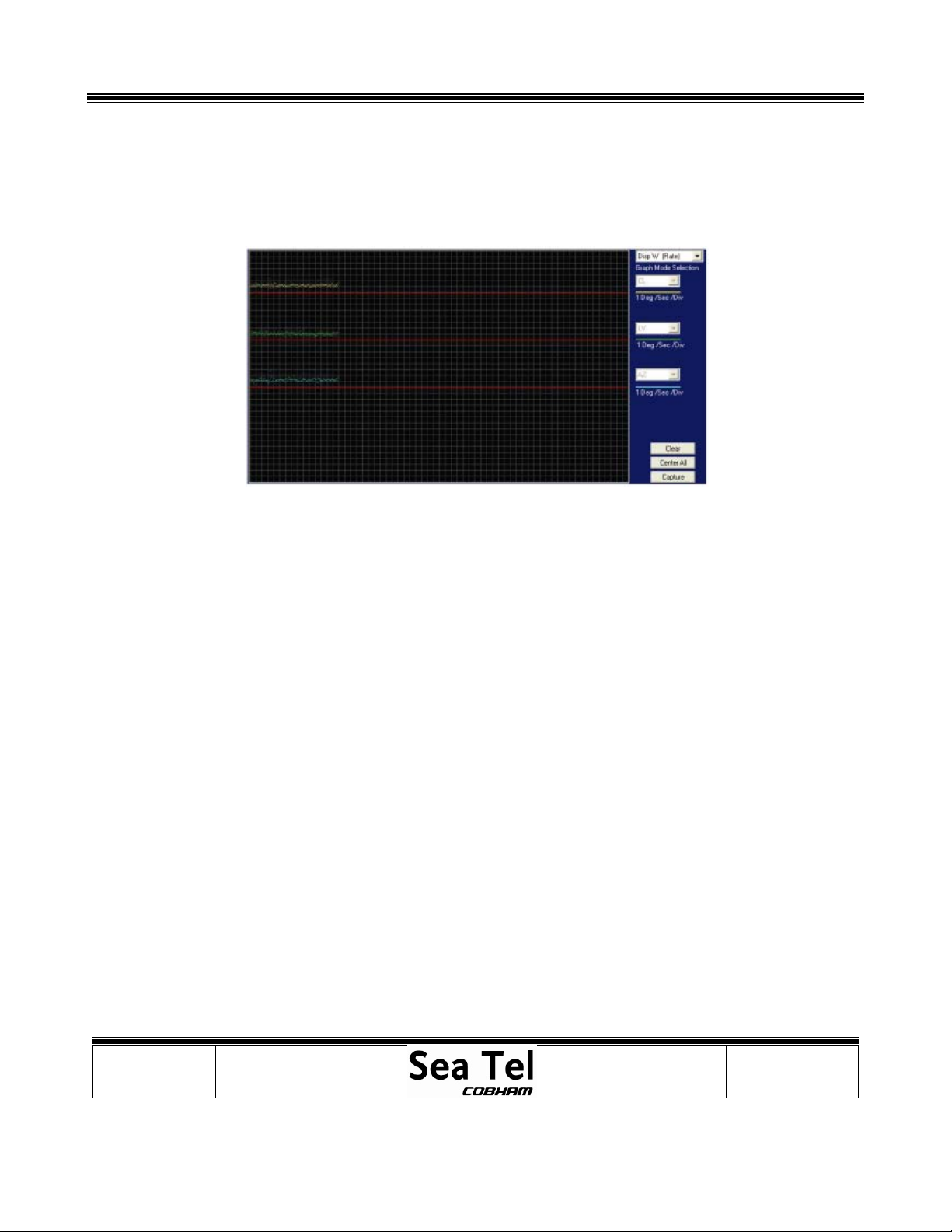
7. RateSensorMonitoring:
RatesensoroutputscanalsobemonitoredusingtheDISP_WscreenofDacRemPtoverifyanydeviationsunderstatic
conditions.Thetracesshouldremainconsistent,anydriftingorspikesareanindicationthesensorsvoltageoutputis
changingandthesensorisdefective(providednoforcesarebeingexertedonthesystem).Normaltraceis+/‐1division
fromredline.
8. AzimuthTargeting:
Shouldtheantennahaveissuestargeting,suchasnotaccuratelyfindingthesatelliteorrepeatedlyfindingthesatellitein
differentazimuthpositions,thenit’simportanttoascertainifthesystemismispointinginazimuthorrelative.Relative
feedbackfromtheazimuthencodercanbeverifiedbyinitializingthesystem,verifyingitcalibratesitselfcorrectlyand
thendrivingthepedestalclockwisein90degreeincrementsovera360degreerotation,notingthatthesystempoints
correctly(bow,starboard,aft,port,bowandstarboard)andthatnoazimuthreferenceerrorisflaggedbythePCU.A
mechanicalproblemsuchasthebeltskippingonthepulley,oranotherphysicalrestriction,couldalsocausethiskindof
error.Skewingtheantennainazimuthbyholdingtherightorleftarrowkeytodrivetheantennaslowlymayalsopresent
anissue.Ifthesystemkeepsfindingthesatelliteatdifferentazimuthpositionsbutatthesamerelative,thentheencoder
isfunctioningcorrectlyandtheazimuthratesensoriscalculatingthemovementincorrectlycausingtheantennato
mispoint.
9. Drift:
Anotherfailurewhichcanoccurisifaratesensorstartsdrifting.Thismeansthesensorsvoltageoutputdeviatesfrom
whatthePCUisexpecting(2.5VDC),whichintroduceserrorintothecontrolloop.It’smorecommontoseethisinthe
azimuthaxisasthecrosslevelandelevationaxishavethetiltsensorastheirlongtermreference(althoughshouldthe
ratesensorsdriftbelargeenoughtooverpowerthetiltsensoryouwouldseethesystemdrivingintooneofthecross
levelorelevationendstops).
Toverifyifthesystemisdriftinginazimuthturnofftrackingandmonitortherelativeposition,understaticconditions
(i.e.whenthevesselsheadingisn’tchanging),itshouldremainstill.Iftherelativevaluebeginstoincrease/decreasefrom
itsnominalpositionthentheazimuthratesensorisdrifting,feedingerrorintothePCU’scontrolloopwhichiscausing
thePCUtobelievethevesselsheadingischangingandinturndrivingtherelativeintheoppositedirectionto
compensate.


















































