CONTENTS
Page
Number
SECTION
I--GENERAL
INFORMATION
1.1
Scope
1-1
1.2
Introduction
....•.•...............•.•.•
1-1
1.3
Disk
Drive
Performance
Characteristics.
1-1
1.4
Disk
Drive
Model
Specifications
.•••.•••
1-1
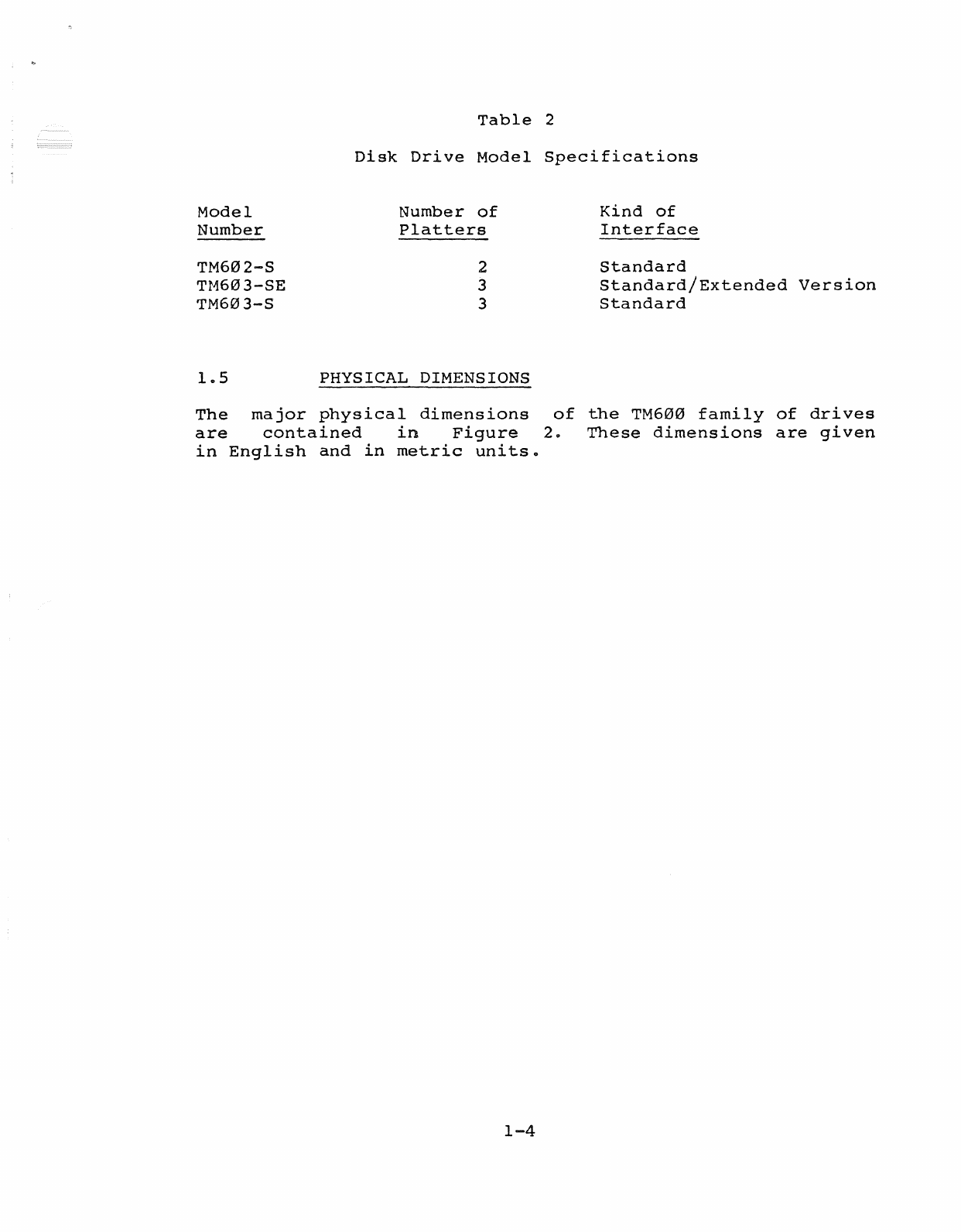
1.5
Pqysical
Dimensions
••..•...•.••.•.•..••
1-4
SECTION
II--INSPECTION,
INSTALLATION,
AND
INTERFACES
2.1
Introduction
••••••••••.••..•.••.•.•..••
2-1
2.2
Unpacking
and
Inspection
•••••••••••.•.•
2-1
2.3
Mounting
Characteristics
•••••••••••••.•
2-3
2.4
Power
Cabling
•••••••••••.••.•••••••••••
2-3
2.5
Standard
Interface
••••••••••.•.••••••••
2-3
SECTION
III--THEORY
OF
OPERATION
3.1
3.2
3.2.1
3.2.2
3.2.3
3.2.4
3.2.5
3.2
..
6
3.3
3.3.1
3.3.2
3.3.3
3.3.4
3.3.5
3.3.6
3.4
3.4.1
3.4.2
Introduction
.•..•.•••.••.•••••.••••.•••
3-1
Input
Control
Lines
••.•••••..••••••••••
3-2
Reduced
Write
Current
.•••.•••..••••.••.
3-2
Write
Gate
••••••.•••••••.•••••••••.••••
3-2
Head
Select
••••••••••.•••.•••••••••••••
3-3
Step
Interface
•••••••••••••••••••••••••
3-3
Di
rect
i
on
In
•••••••••••••••••.•••••••••
3-4
Drive
Select
••••••••••••.•••.••••••••••
3-4
Output
Control
Lines
••••.•••••••••••••••
3-5
Drive
Selected
•••••••••••••••••••••••••
3-5
Seek
Complete
••••••••••••••••••••••••••
3-5
Track
00eJ
••••••••••••••••••••••••••••••
3-5
Fault
0
••••••••••••
,.
••••
3-6
Line
Ready
•••••••••••••••••••••••••.•••
3-6
Index
3-6
Data
Transfer
Lines
••••••••••••••.•••••
3-6
MFM
Write
Data
•••••••••.••••••.••••.•••
3-6
MFM
Read
Data
••••••••••••••••••••••••••
3-7