INDUSTRY STANDARD INTERFACE
COMPATIBILITY
Both drives are compatible with controllers that use an
ST506/412 industry standard interface.
FRONT PANEL
Front panels equipped with an activity indicator are
available for each
of
the drives.
AIR FILTRATION
A self-contained, recirculating air filtration system sup-
plies clean air through a 0.3-micron filter. A secondary
breather filter is provided to allow pressure equaliza-
tion with the ambient atmosphere without contamina-
tion. The entire head-disk-actuator compartment is
maintained at a slightly positive pressure
to
further en-
sure an ultraclean environment.
1.4
FUNCTIONAL DESCRIPTION
The functional characteristics
of
the TM362 and
TM262 drives are identical. The drives are fully self-
contained and require no operator intervention during
normal operation. During the power-up sequence, the
spindle motor reaches 3,568 RPM, and the position-
ing mechanism recalibrates the recording heads back
to Track
0.
If
the spindle motor does not get up to speed
within
15
seconds, the drivers to the spindle motor will
be
turned off. A new power up sequence will be at-
tempted when the power is momentarily removed and
then restored.
The drives are designed to optimize
MFM
write and
read data recording methods,
as
specified
by
the
ST506/412 interface. Data recovery electronics include
1-2
a low-level read amplifier, differentiator, a zero-
crossover detector, and digitizing circuits. No data en-
coding or decoding features are provided on the drives.
The heads are positioned over the desired track
by
means
of
a stepper motor and a rack and pinion
mechanism. Servo positioning pulses are recorded on
the final segment
of
each Head 0 track, and,
by
con-
tinuously monitoring the location
of
the heads in rela-
tionship to those pulses, the drive is able to maintain
highly accurate servo positioning.
The onboard microprocessor monitors all functions that
could affect drive performance.
If
a problem exists, the
drive will abort its power-up sequence
or
(after achiev-
ing a Ready state) declare a fault condition.
A parking zone is provided for the read/write heads
at cylinder 663. The parking function is under the con-
trol
of
the drive controller.
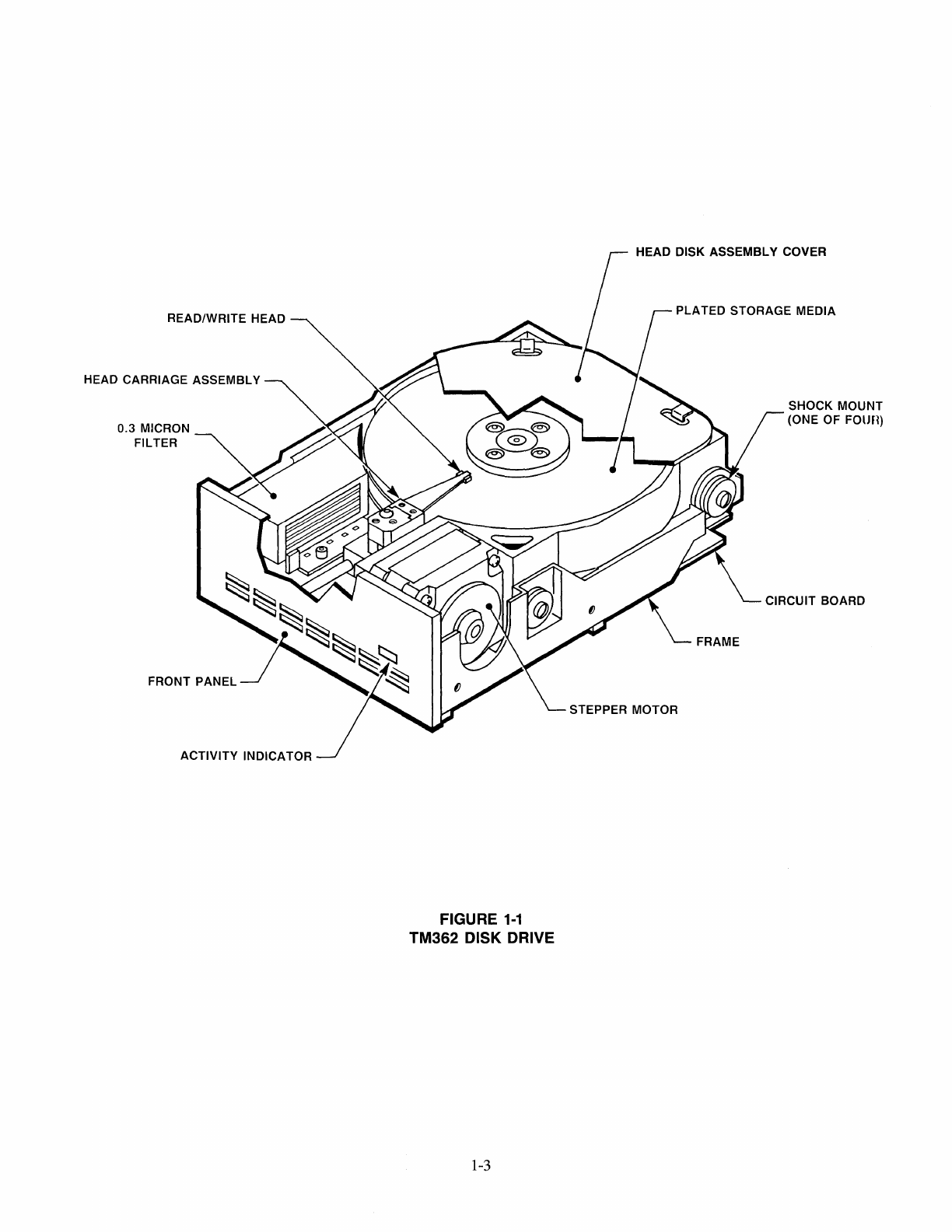
1.5 PHYSICAL DESCRIPTION
The TM362 and TM262 drives differ only in the
physical dimensions
of
their frames. The TM362 uses
the smaller frame, and the TM262 the larger.
The TM362 drive
is
shown in Figure
1-1
and the TM262
drive in Figure
1-2.
Both drives contain 3.5-inch storage
media.
The
head
disk
assembly
and the
read/write
preamplifiers are enclosed in a sealed cast aluminum
housing, which includes an air
fil~ration
system
to
en-
sure a contamination-free environment. The housing
is shock mounted to a metal frame. A front panel may
be attached to either drive. Threaded holes are provid-
ed on the sides and bottom
of
the frame for mounting
the drive onto a chassis.
In addition, both drives include read/write control elec-
tronics and servo spindle control electronics.