Table of Contents
Page
1.0 Introduction.....................................................................................................................1
2.0 General Information .......................................................................................................2
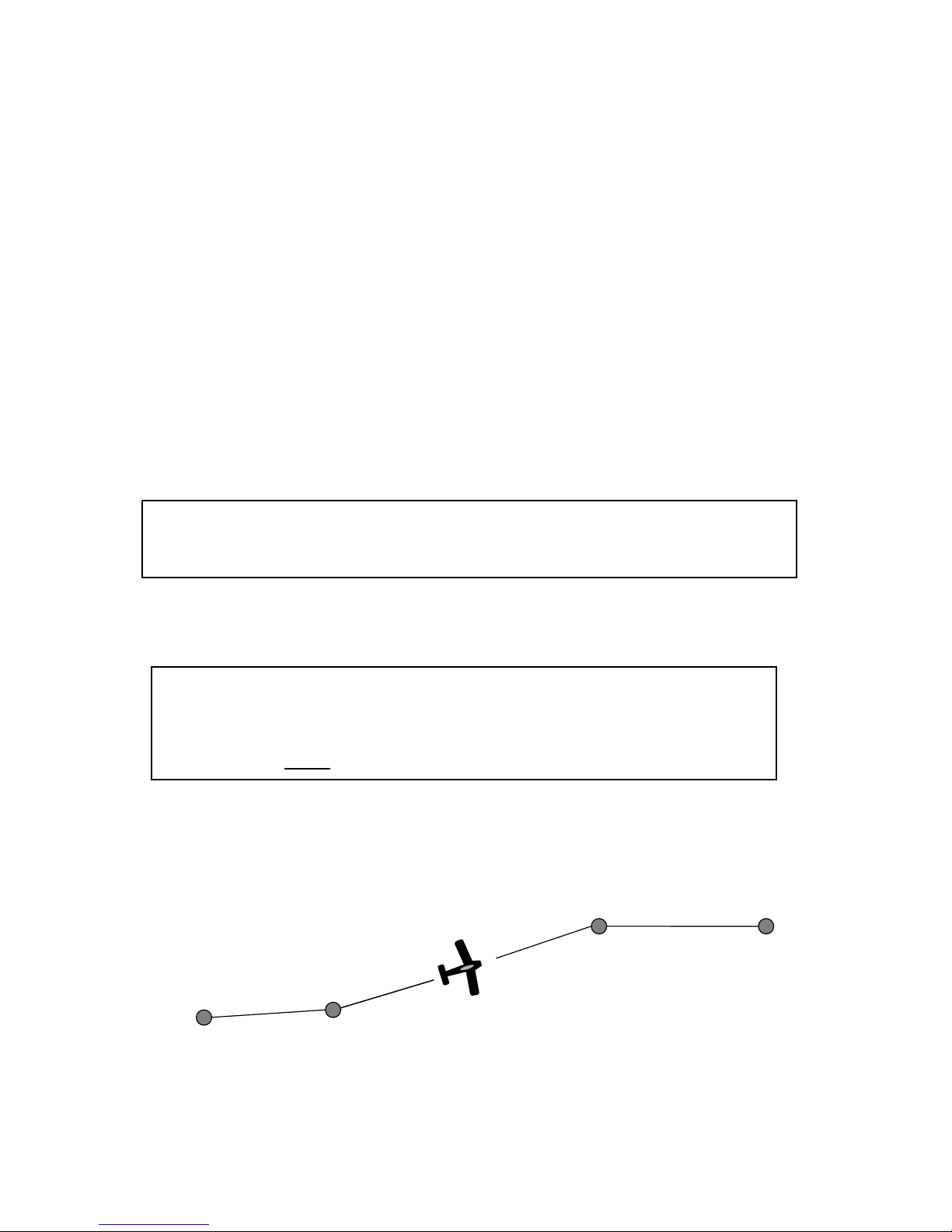
Track Mode (TRK)............................................................................................................2
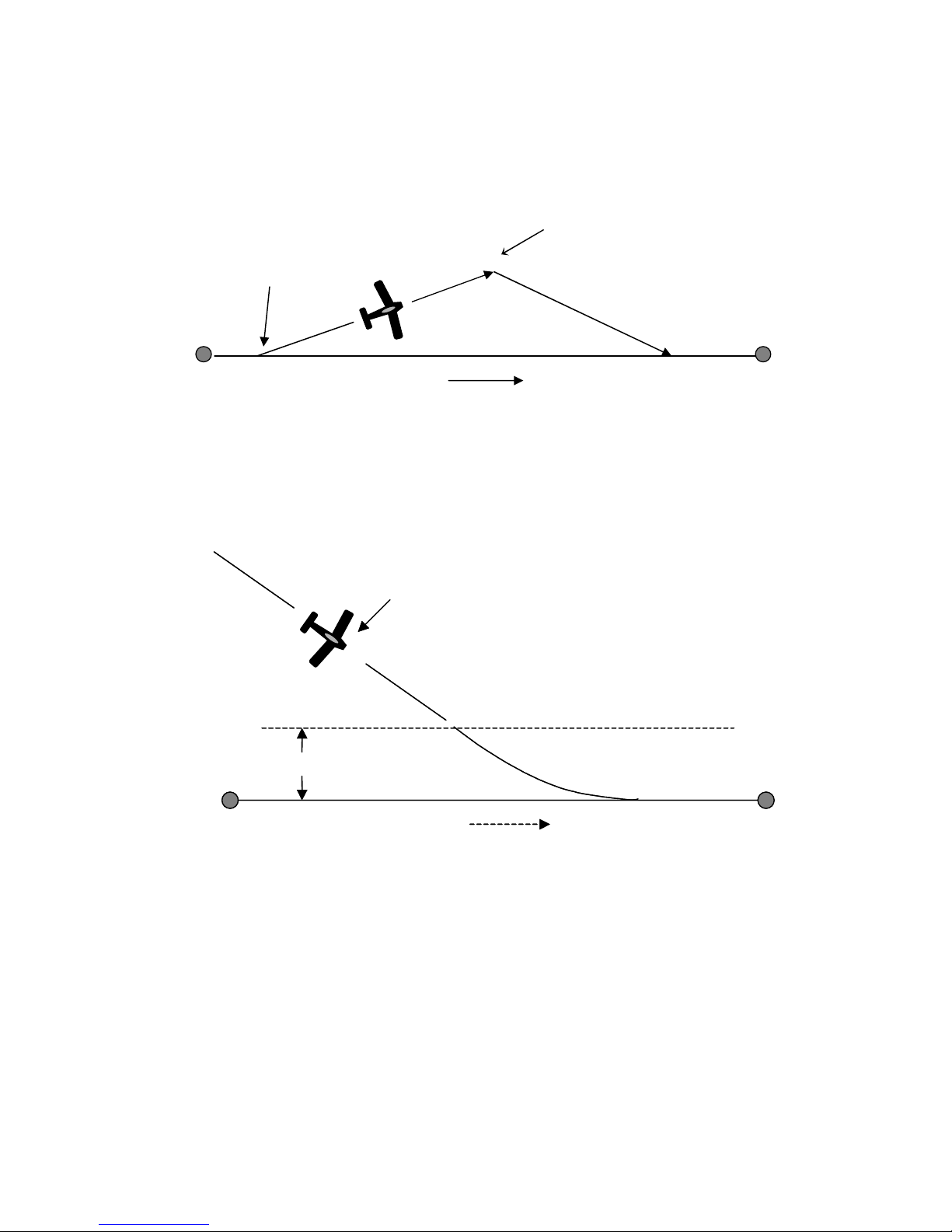
Course Mode (CRS).........................................................................................................3
Intercept Mode (INT) ........................................................................................................3
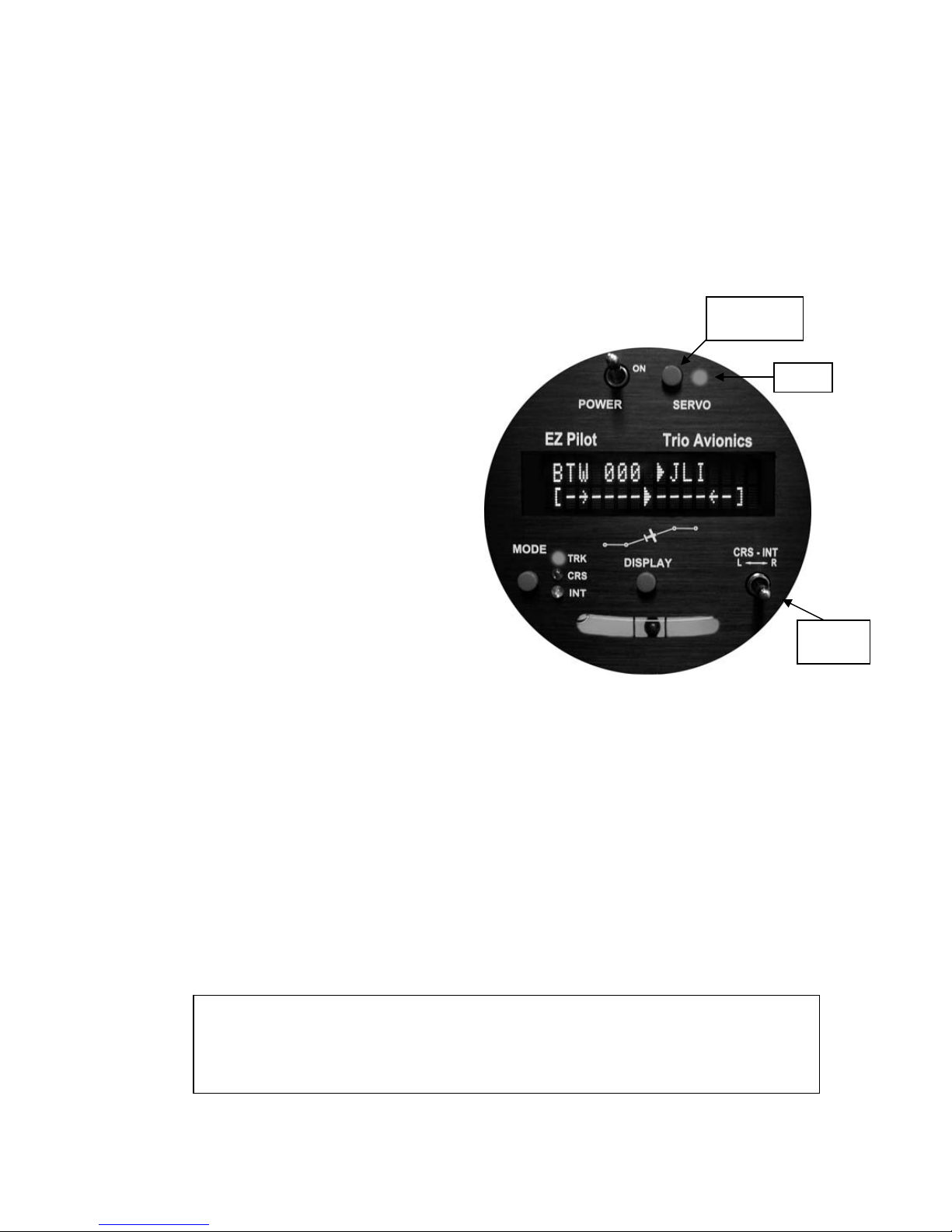
3.0 Control and Display Unit................................................................................................4
3.1 Switch Function and Operation .................................................................................4
3.1.1 On/Off Switch.........................................................................................4
3.1.2 Mode Switch...........................................................................................4
3.1.3 Servo Power Switch...............................................................................5
3.1.4 Display Switch........................................................................................5
3.1.5 Left or Right (L/R) Switch.......................................................................6
3.2 Display Information....................................................................................................7
3.2.1 Power Up Display ..................................................................................7
3.2.2 Initial Logo Screen.................................................................................7
3.2.3 NO GPS Screen.....................................................................................7
3.2.4 GPS Active, Normal Power-Up Display.................................................8
3.2.5 TRK Mode, GPS Signals Present..........................................................8
3.2.6 TRK Mode, BTW (Bearing to Waypoint field)........................................8
3.2.7 Variable Field, Top Line.........................................................................8
3.2.7.1 XTK (Cross Track Error Field) ..................................................8
3.2.8 TRK (Groundtrack Field)........................................................................9
3.2.9 Variable Fields, Bottom Line..................................................................9
3.2.9.1 GS (Groundspeed)....................................................................9
3.2.9.2 ETE (Estimated Time En-route, HH:MM) .................................9
3.2.9.3 ETe (Estimated Time En-route, MM:SS)................................10
3.2.9.4 RNG (Range to Waypoint)......................................................10
3.2.9.5 Waypoint.................................................................................10
3.2.9.6 Digital Turn Coordinator Display.............................................10
3.2.9.7 DIS?........................................................................................10
3.2.9.8 TRN?.......................................................................................11
3.2.9.9 SPD?.......................................................................................11
3.2.10 CRS (Course) Mode ............................................................................11
3.2.11 INT (Intercept) Mode............................................................................12
3.2.12 TOP (Track Offset Position).................................................................12
3.2.13 Automatic Course Reversal.................................................................13
3.2.14 Variable Display Field – Upper Line.....................................................14
3.2.15 Other Display Presentations................................................................14
4.0 Setup Screens...............................................................................................................14
4.1 Contrast Setting (LCD model only)..........................................................................15
4.2 Initial Servo Position and SERVO direction.............................................................15
4.3 Max Turn Rate selection..........................................................................................15
4.4 IO = Dim or Mode? Screen......................................................................................16
4.5 Circle Last WPT? Screen........................................................................................16
4.6 Turn Rate Display selection (EZ Pilot II only)..........................................................17
4.7 Custom Screen Setup .............................................................................................17
4.8 Software Configuration and Serial Number.............................................................17
5.0 Ground Operation and Flight Example ......................................................................17
5.1 Power Up and Initial Settings ..................................................................................17
5.2 Flying to a Courseline or GOTO Waypoint..............................................................19
5.3 Loss of GPS.............................................................................................................19