ZED-F9R - Application note
UBX-22035176 - R01 Contents Page 3 of 30
C1-Public
Contents
Document information................................................................................................................................2
Contents ..........................................................................................................................................................3
1Introduction.............................................................................................................................................5
1.1 Required items............................................................................................................................................. 5
1.1.1 Operational ZED-F9R module .......................................................................................................... 5
1.1.2 GNSS antenna requirements ...........................................................................................................5
1.1.3 Host system......................................................................................................................................... 6
1.1.4 Odometer data .................................................................................................................................... 6
1.1.5 Correction data ................................................................................................................................... 6
2Communicating with the receiver in u-center .............................................................................7
2.1 Connecting the receiver with u-center ................................................................................................... 7
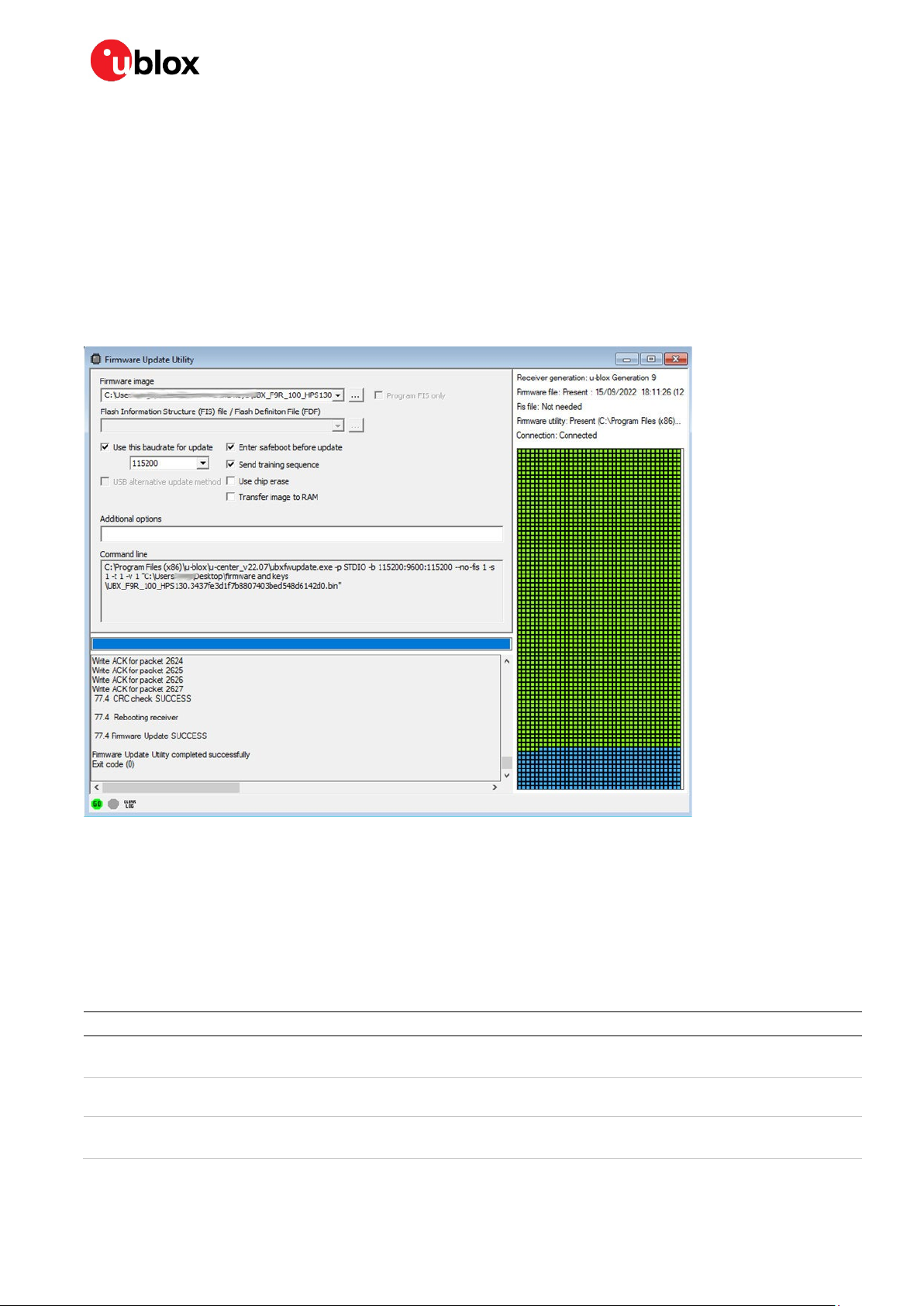
2.2 Updating the receiver firmware ............................................................................................................... 7
2.3 Storing configuration settings.................................................................................................................8
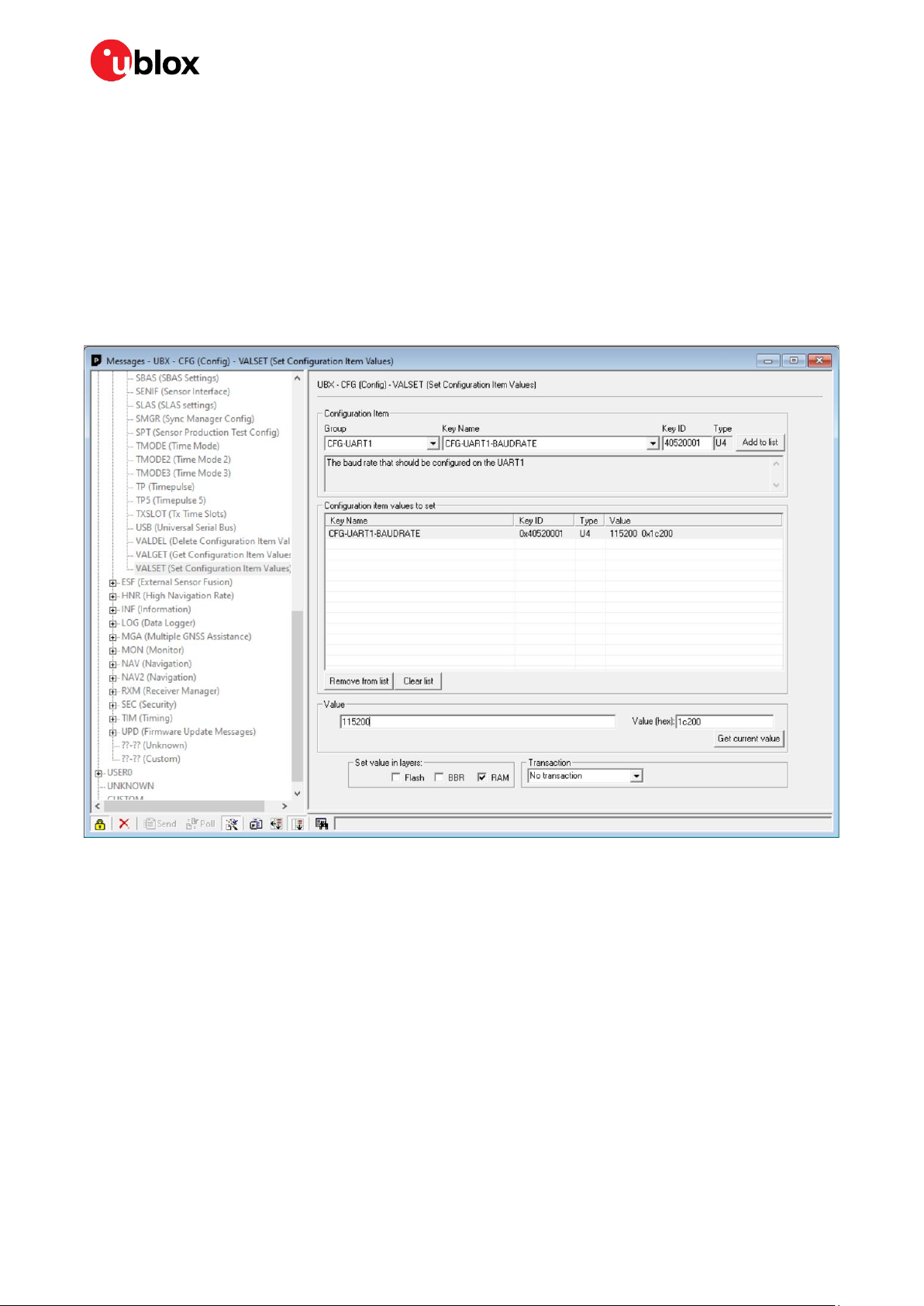
2.4 Modifying the receiver configuration in UBX-CFG-VALSET view .....................................................9
2.5 Modifying the receiver configuration in the Generation 9 Advanced Configuration view ...........9
3Installation ............................................................................................................................................ 11
3.1 Mounting the receiver ..............................................................................................................................11
3.2 Mounting the antenna .............................................................................................................................13
3.3 Connecting cables.....................................................................................................................................13
3.4 Setting up UART configuration..............................................................................................................13
4GNSS setup........................................................................................................................................... 14
4.1 Verifying GNSS signals ............................................................................................................................14
4.2 Changing enabled constellations ..........................................................................................................15
5RTK setup.............................................................................................................................................. 16
5.1 Setting up NTRIP client in u-center.......................................................................................................16
5.2 Setting up MQTT client in u-center.......................................................................................................17
5.3 Monitoring RTK status ............................................................................................................................18
6Sensor fusion setup ........................................................................................................................... 19
6.1 Providing odometer data to the receiver..............................................................................................19
6.1.1 Wheel ticks.........................................................................................................................................19
6.1.2 Speed...................................................................................................................................................19
6.1.3 Data stream quality..........................................................................................................................19
6.1.4 UBX-ESF-MEAS sample code ........................................................................................................20
6.2 Sensor fusion configuration ...................................................................................................................20
6.2.1 Dynamic platform model.................................................................................................................21
6.2.2 IMU-mount alignment .....................................................................................................................21
6.2.3 Setting up odometer configuration ..............................................................................................21
6.2.4 Navigation output rate ....................................................................................................................22
7Calibration and testing ..................................................................................................................... 23
7.1 Initialization and calibration ...................................................................................................................23