1094-0561-D
Start Up
2.1 Getting Started 2Start Up and Shut Down
To Start SceneScan Dashboard
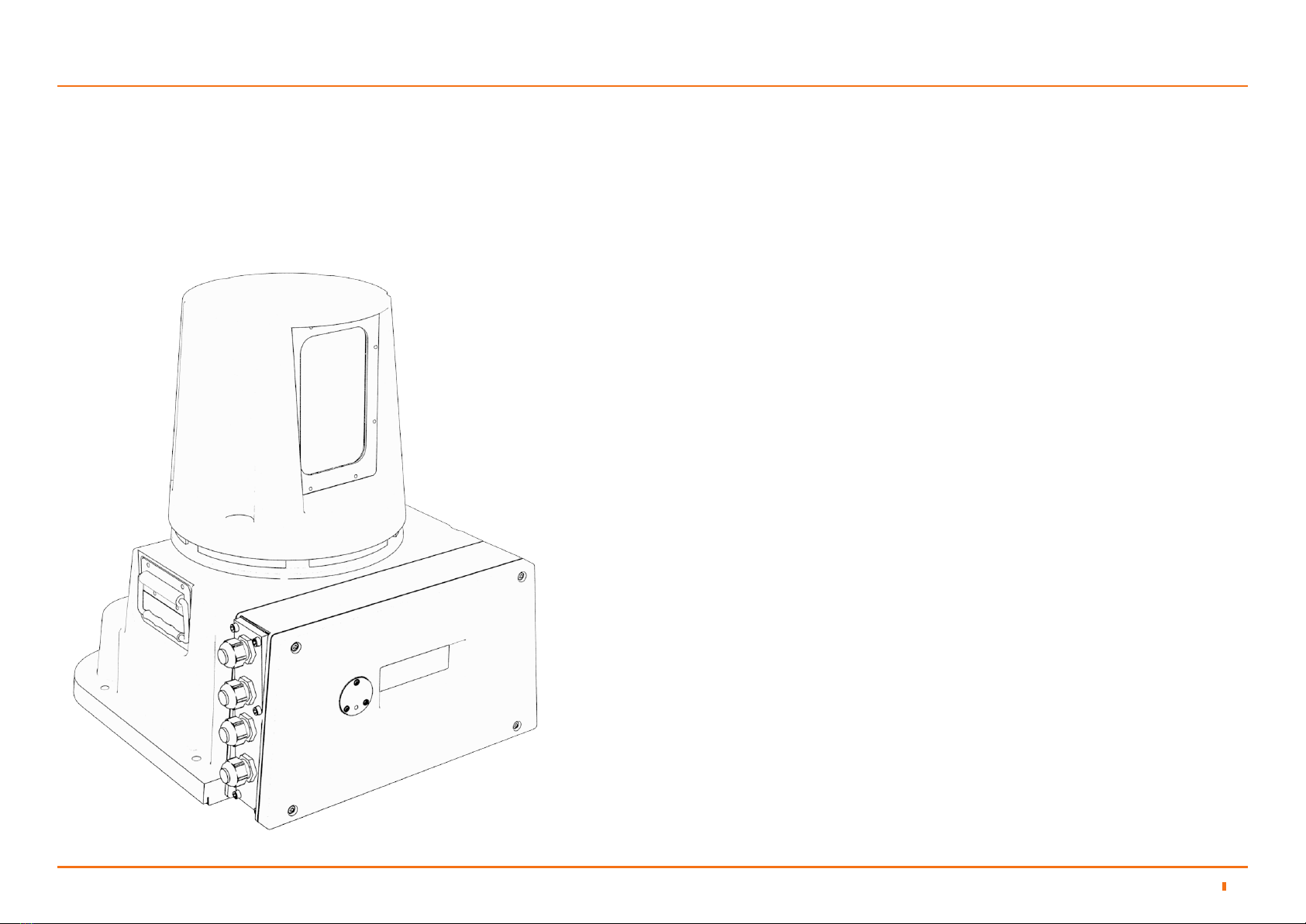
1. Ensure that the SceneScan Sensor is powered on.
2. Double-click on the SceneScan Dashboard icon.
(Or run the SceneScan Dashboard from
Start > All Programs > Guidance Marine Ltd > SceneScan > SceneScan
Dashboard).
3. The Dashboard display screen will appear.
If the Sensor is currently suspended, the main part of the screen will be greyed
out. Click on the Resume button in the side bar in order for the Sensor to begin
scanning and for the results to be displayed on the screen. If the Sensor was
already scanning, then the current scene will be displayed.
Shut Down
To Suspend, Exit or Disconnect
1. Click on the Guidance button in the lower left corner of the screen.
2. This will reveal buttons in the side bar as follows: (see right).
3. Suspend - Places the Sensor into a ‘sleep mode’. The rotor ceases spinning and
the scanner tilt returns to a xed state. The unit can be returned to full operation
via a Resume command from the Dashboard. This mode is suitable for use
when travelling between locations.
4. Disconnect - Ceases communications between the Dashboard and Sensor and
causes the main part of the screen to be greyed out. Does not cause the Sensor
to stop spinning or tracking the scene.
5. Suspend And Exit - Places the Sensor into the same ‘sleep mode’ as the
suspend command (discussed above) and also closes the SceneScan
Dashboard program.
6. Exit - Closes down the Dashboard without affecting the Sensor.
Dashboard Screen with Sensor Suspended Dashboard Screen with Sensor Scanning
Dashboard
In Command
Dashboard
Monitoring
See Multi-Dashboard
SceneScan Systems (page
32) for information on In
Command/Monitoring
functionality.