Series 3 Technician’s Installation and Service Training Manual
Understanding How ZAP Commercial Operators Work
Series 3 Technician’s Installation and Service Training Manual
Understanding How ZAP Commercial Operators Work
Series 3 Understanding How ZAP Commercial Operators Work
ZAP Series 3
Simply Logical
ZAP Controls
100 Waterloo Blvd. Anglesey Business Park, Littleworth Road, Cannock, Staffordshire, England
UK Contact 011-44-154-387-9444 sales@zap-uk.com
USA Contact 931-510-4432 sales@zap-america.com
USA Tech Support 931-510-4432 via telephone or text
Online www.zap-uk.com
Unlike traditional operators, ZAP
operators do not have limit
assemblies.
ZAP operators use a 21st
century technology, that uses
runtime calibration and current
sensing technology to perform the functions of limit
assemblies.
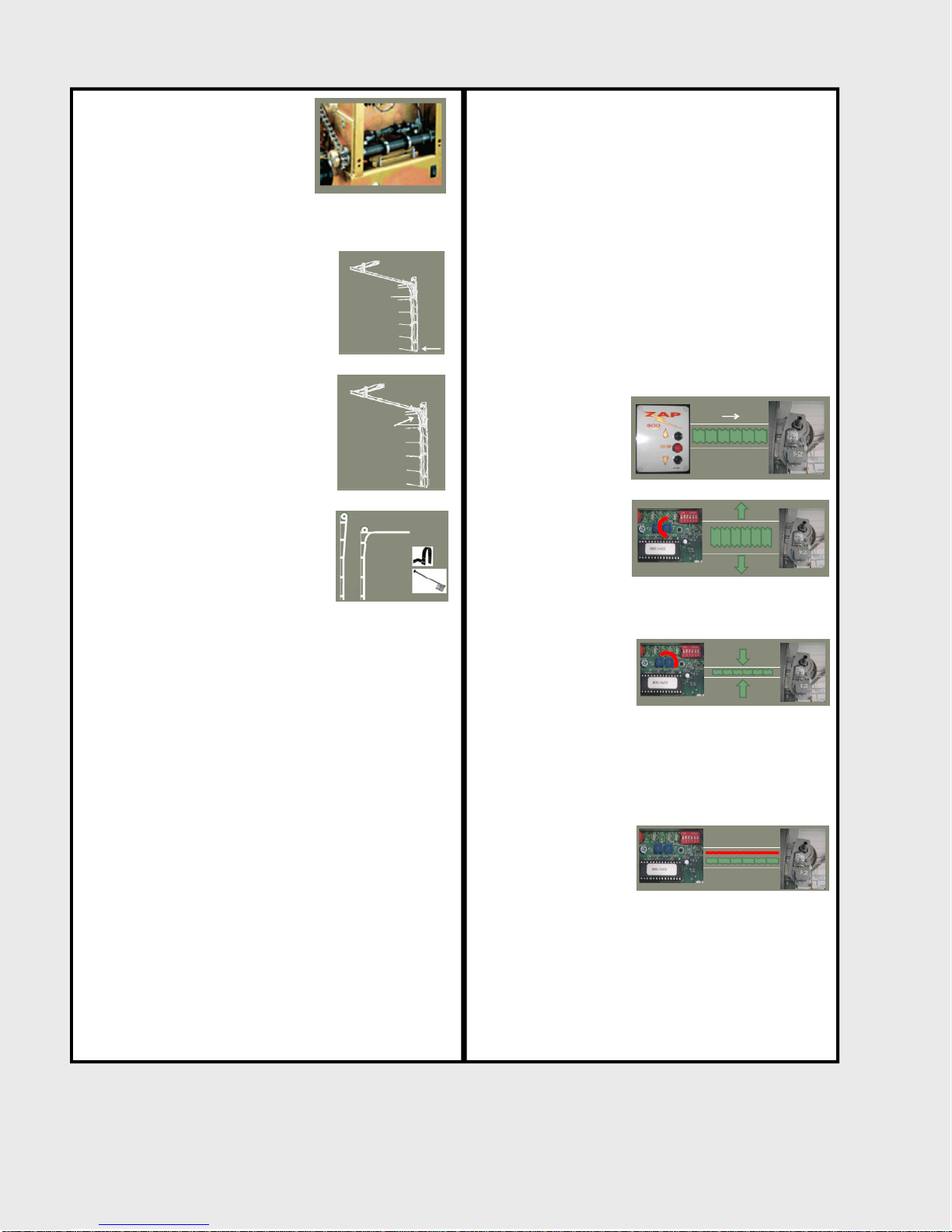
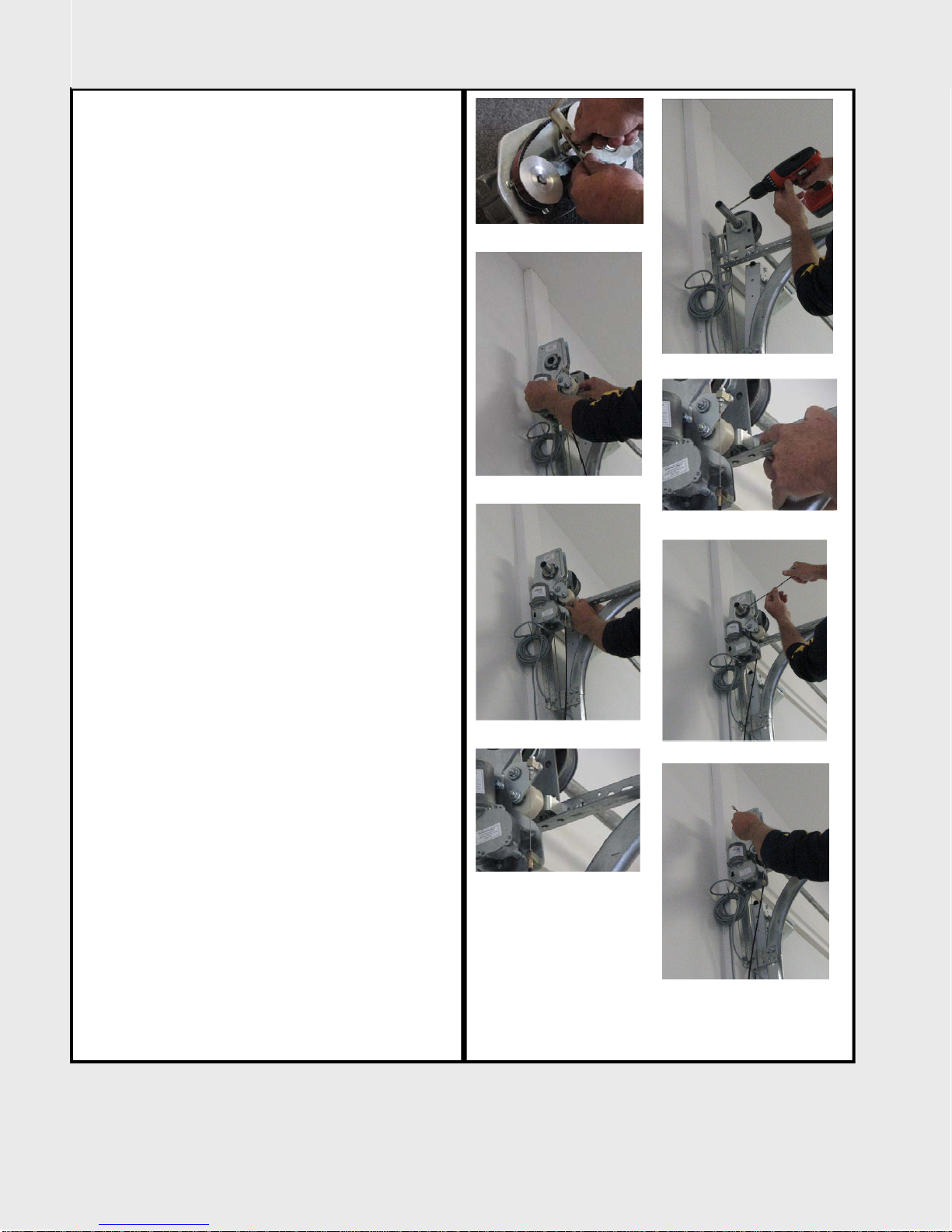
The limits of the door operator are
physical in nature.
The floor being the down limit.
(Figure A)
A physical stop for the upper limit.
On standard lift and low headroom
doors the physical stop is the track
radius as the door can only rise so
high into the radius before the
torsion shaft would have to counter
rotate to allow the door to go
higher. (Figure B)
On high-lift and vertical lift doors it
should be a bumper or pusher
spring. (Figure C)
The controller monitors the motor
load current. It therefore becomes a sensor that
automatically detects the door limits as well as
obstructions that can occur without the use of an
aftermarket safety edge. Because of its unique
abilities it can detect an obstructions on any part of
the door, not just the leading door edge.
Speed Change Point Calibration.
Calibration of slow speed change point is needed to
determine an approximation of the physical limits.
During the initial open calibration cycle, the
controller is measuring the run time to the upper
limit.
Approximately half way through the first open cycle
of operation, note that the operator will slow down.
This slow down is called a speed change point. After
completing the first up cycle, the run time to the
upper limit is stored into memory. The same thing
occurs on the close calibration cycle. Approximately
half way through the first close cycle of operation,
the operator will again slow down. After completing
the first close cycle, the close run time is stored into
memory as well and is compared to the open run
time.
During the second calibration run, the run times
are verified against the first set of run times. If
they match, they are stored into memory. It takes
2-3 complete cycles to fully calibrate the run time.
Once the operator has fully calibrated the run
times, the controller moves the opening speed
change point to within seconds of the end of the
calibrated open run time. Likewise, the controller
moves the closing speed change point to within
seconds of the end of it’s calibrated run time. This
is how the controller knows where the limits are
and where to stop.
Motor power and sensitivity potentiometer,
obstruction sensing, automatic reversing and
safety stop.
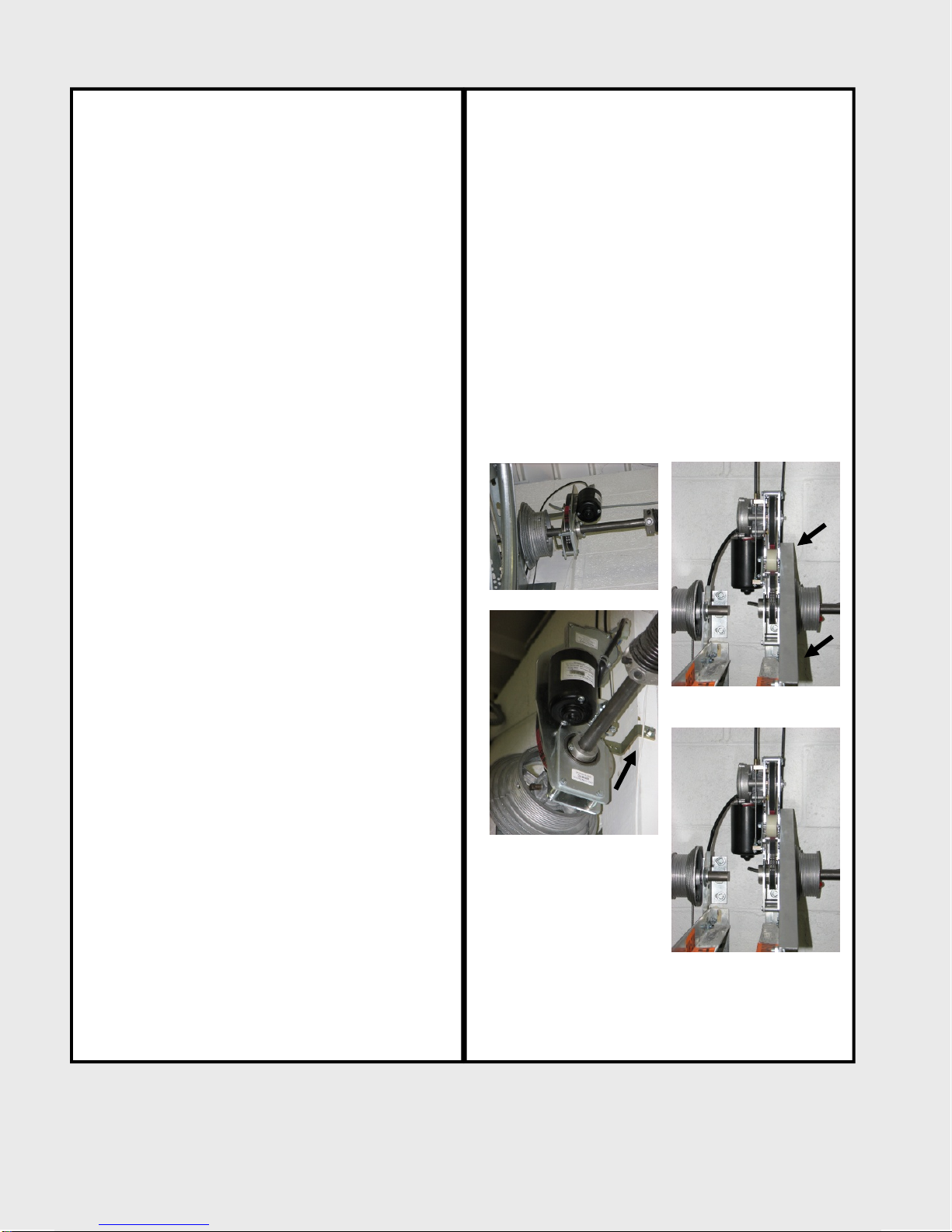
Picture if you will,
current flowing to the
motor.
(Figure D)
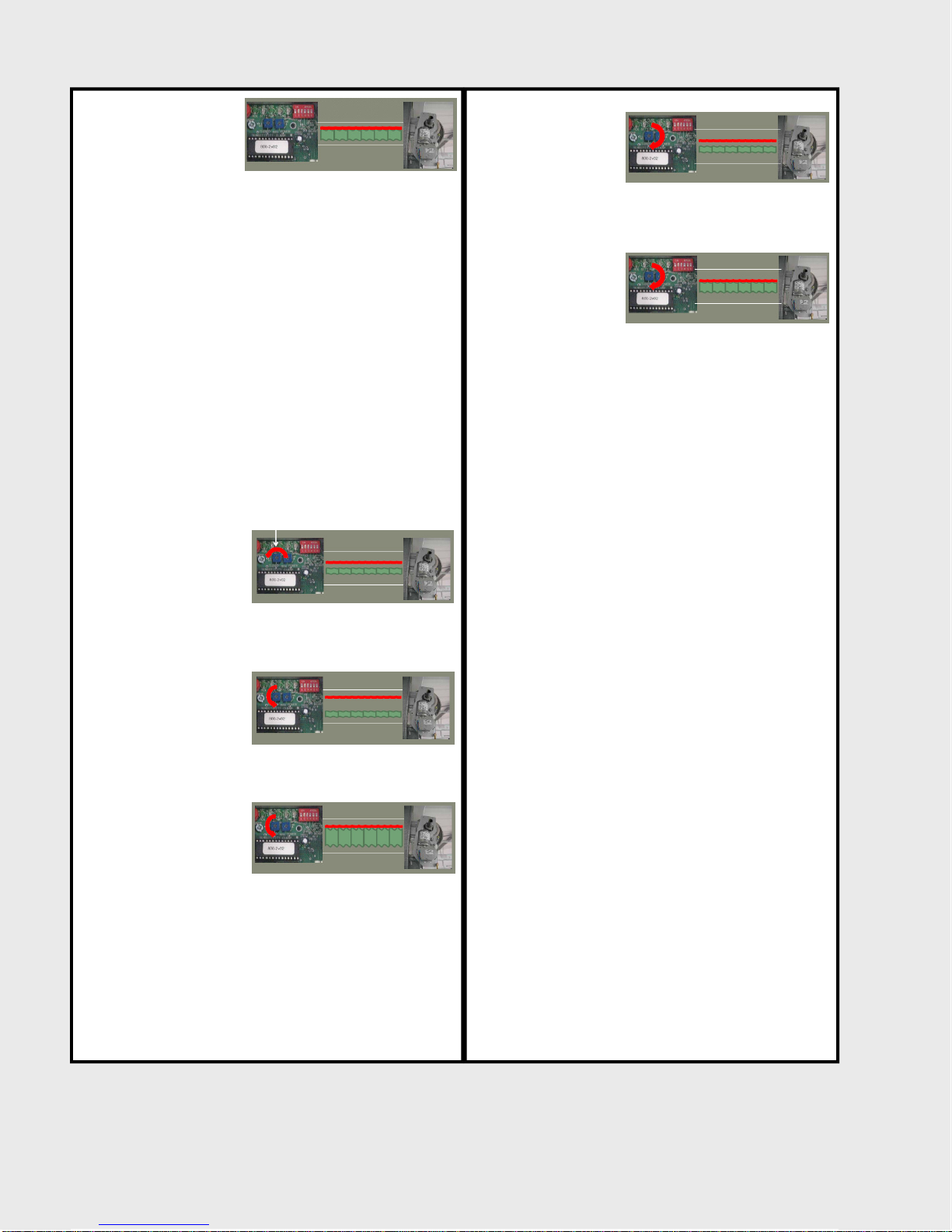
If you increase power
at the power
potentiometer you
open up the range of
power that can be
applied to the motor.
(Figure E)
If you decrease power
at the power
potentiometer it
closes the range of
power that can be
applied to the motor. (Figure F)
Inherent safety functions
Stop at limit, safety stop, and automatic reversing
The inherent safety
and sensitivity
function’s monitor the
system by mirroring
the motor current. If
the door meets an
obstruction in either direction, the current spikes.
(Figure F)
Continued on next page.
Figure C
Figure B
Figure F
Figure D
Figure E
Figure A
Figure F
4