CANFDNET-400U
High-performance Four-channel CANFD Bus-to-Ethernet Converter User Manual
©2021 Guangzhou ZLG Microelectronics Technology Corp.,Ltd.
1
1. Functions
1.1 Overview
The CANFDBridge intelligent CANFD bridge is a high-performance CAN (FD) relay
and CAN (FD) message conversion device. It can increase the load capacity of the bus
and extend the communication distance, match CAN (FD) networks with different
communication baud rates, and support the conversion of CAN and CANFD networks.
CANFDBridge, as a CAN (FD) intelligent bridge, supports the default conversion
processing of CAN to CAN, CAN to CANFD, CANFD to CAN, CANFD to CANFD and
other messages. In addition, it provides special conversion processing such as frame
mapping, merging (several CAN messages form a CANFD message) and splitting (a
CANFD message is split into several CAN messages). You can freely set the rules for
forwarding and mapping, grouping and unpacking of CAN (FD) messages to meet your
own application needs. After you connect the PC over the USB interface, use the
CANFDBridge configuration tool to configure the baud rate and rules. Then you can use it
offline easily.
1.2 Features
Two completely electrically isolated CAN (FD) channels. You can choose whether the
CAN controller is CAN or CANFD;
Support both ends of CAN (FD) channel baud rate setting. Common baud rates can
be set, and the baud rate can be customized;
The baud rate range is 40k-5Mbps;
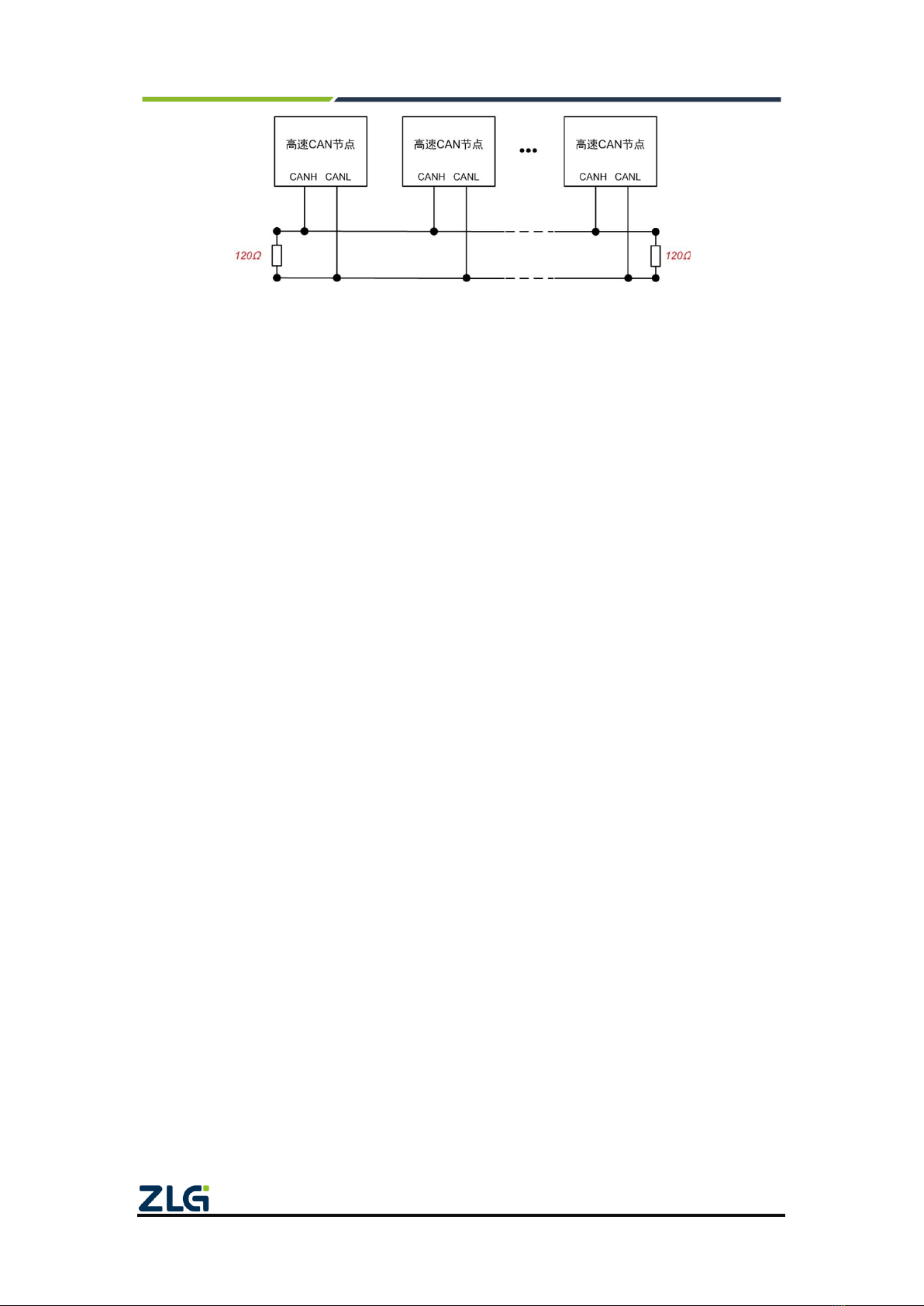
Supports setting the 120-ohm terminal resistance switch at both ends of the CAN (FD)
channel;
Supports setting the receiving hardware filtering function of CAN (FD) channels at
both ends. Each channel supports 64 standard/extended frame IDs. The filtering
method is whitelist filtering, which minimizes the load of the CAN bus;
When using USB to connect the device to the computer, you can enable the function
of automatically reporting and recording the current error status and error count
(sending and receiving error counts) of the CAN (FD) channels at both ends by using
the CANFDBridge configuration tool. It can be used as a very practical CAN network
status analyzer, which quickly determines the CAN communication quality;
Supports CAN (FD) message forwarding, including three forwarding modes: (1) basic
forwarding; (2) frame mapping; (3) grouping and unpacking. The forwarding function
is mainly for received CAN(FD) frames. Before forwarding, the received frames are
processed such as mapping, grouping and unpacking, and the processed frames are
sent. The processing priority is: grouping and unpacking > frame mapping > basic
forwarding;
After forwarding fails, return the specified frame to tell the sender that the forwarding
failed;
In the case of relaying, the CAN single-channel standard frame rate can reach 6,000