Page 4
3.3 SMA Synchronisation Connectors ..............................................................................................................14
3.4 Discovering a Unit’s Serial Number and Installed Product Options ...........................................................15
3.4.1 The Unit Serial Number and its relation to the Ethernet MAC address............................................ 15
3.4.2 Installed Product Options.................................................................................................................. 15
3.5. The RG408 Hardware Platform .......................................................................................................................15
3.4.3 Handling and Transportation............................................................................................................. 16
3.4.4 RG Platform Firmware ....................................................................................................................... 16
4 Block Diagram ................................................................................................................................................... 17
5 User Interface ................................................................................................................................................... 17
5.1 Initial (Power-up) display............................................................................................................................17
5.2 Normal (Status) display ..............................................................................................................................18
6 Front Panel Interaction..................................................................................................................................... 20
6.1 IP address....................................................................................................................................................22
6.2 Time Synchronisation .................................................................................................................................23
6.3 Health Display.............................................................................................................................................23
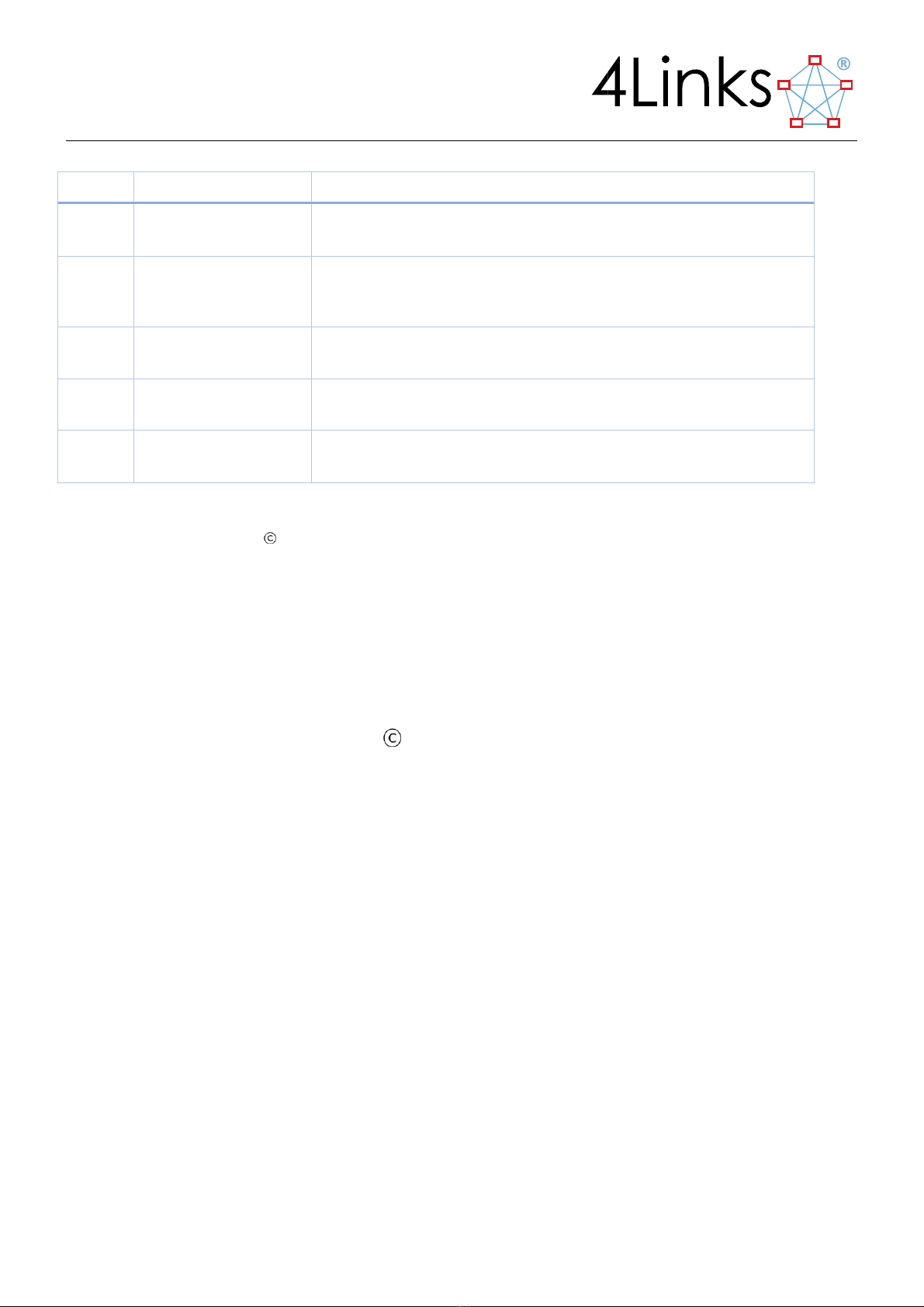
7 DSI Option Details............................................................................................................................................. 25
8 Option ER –Event/Error Reporting................................................................................................................... 25
9 Option TT –Time Tags ...................................................................................................................................... 25
10 Option EI –Event/Error Injection...................................................................................................................... 26
11 Option EW –Event/Error Waveforms............................................................................................................. 27
11.1.1 SpWIO Event Waveform Defaults.................................................................................................... 30
11.1.2 SpWIO Event Waveform Examples ................................................................................................... 30
12 Option SO –Synchronised Outputs .................................................................................................................. 31
13 Option CO –Controlled Outputs....................................................................................................................... 33
14 Option OD and OE –Output Disable and Output Enable ................................................................................. 34
15 Unit –to –unit Time-Tag Synchronisation ....................................................................................................... 35
15.1 Setting the Synchronisation Source............................................................................................................36
16 Software............................................................................................................................................................ 38
16.1 Files Supplied with the DSI .........................................................................................................................38
16.2 Controlling the DSI using the SpWIO Program.........................................................................................38
16.3 The RMAP plugin for the SpWIO Program ...............................................................................................39
16.4 C-language Application Programming Interface ........................................................................................39