Instruction leaflet
DE
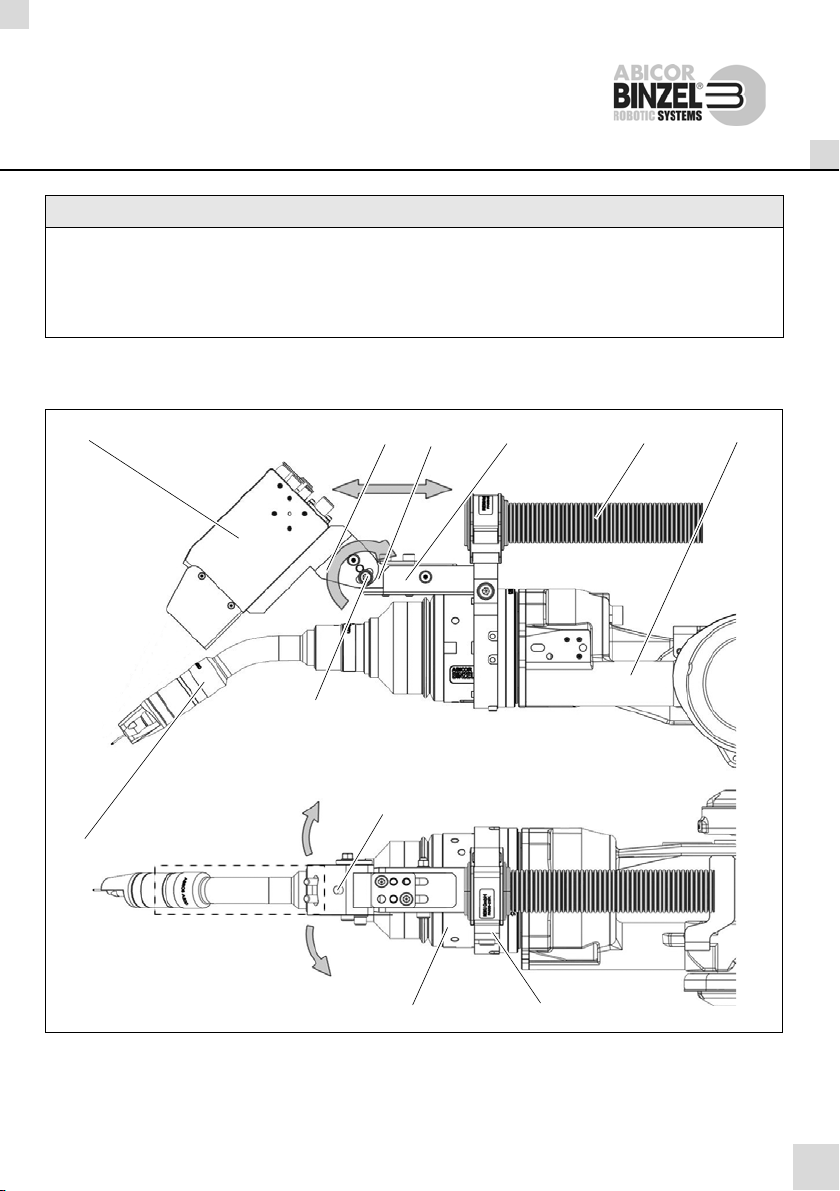
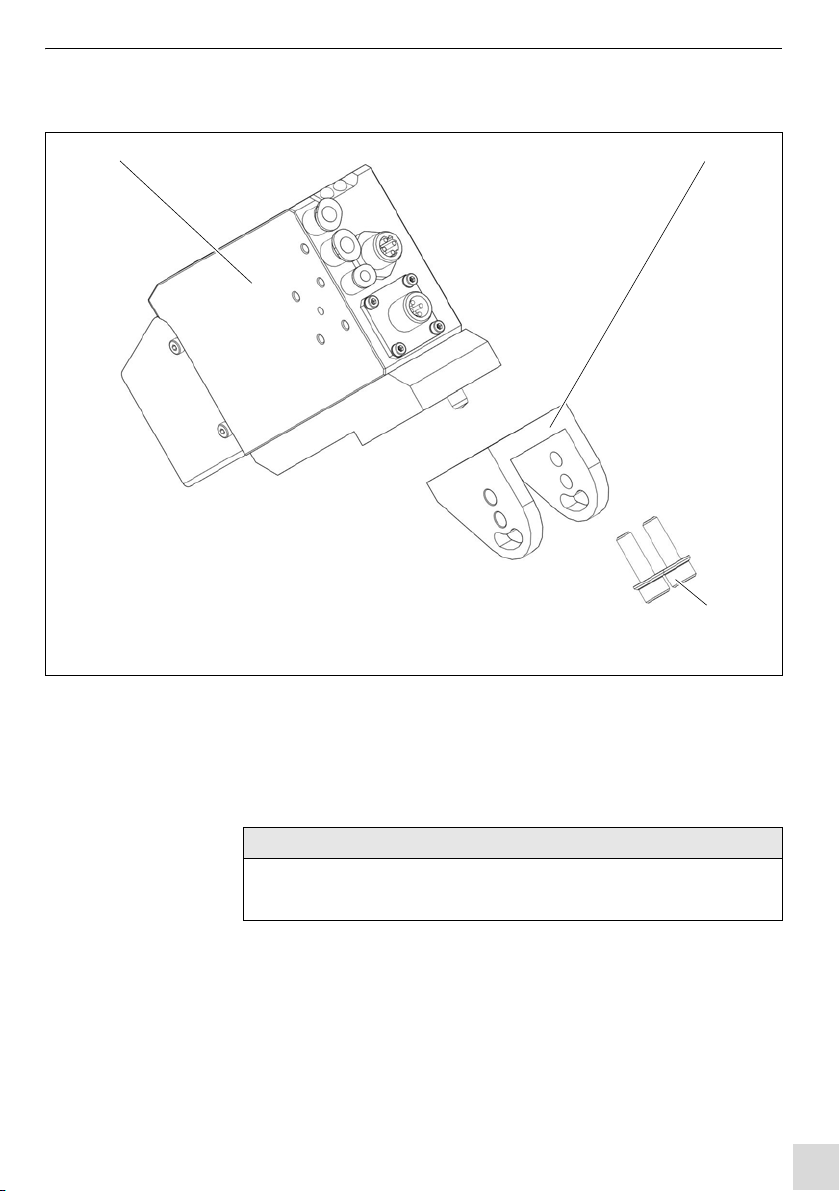
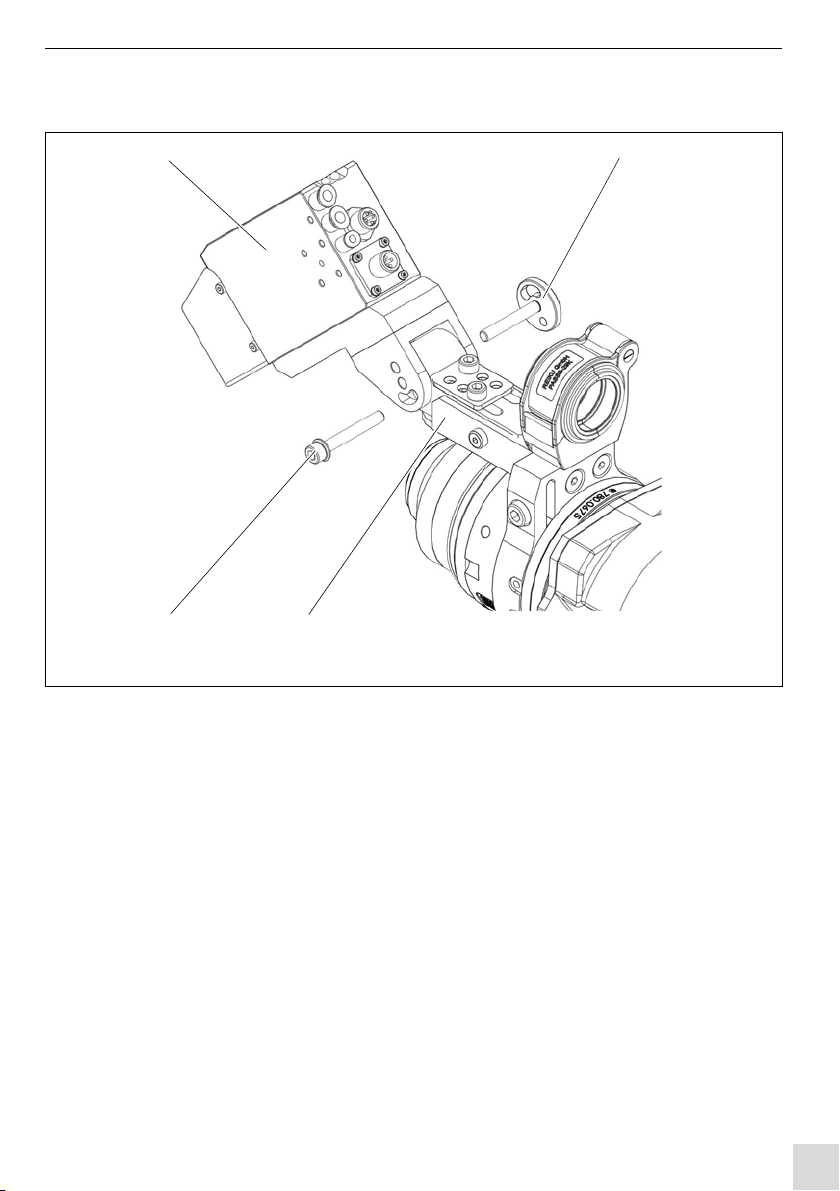
Die Halterung (4) ist in den Achsen A und B sowie in den Richtungen +X und -X verstellbar.
Es können alle Brennerhälse der Serien ABIROB®Aund W(Standard Ausführung, alle Winkel) verwendet
werden. Für die Sonderbrenner-Geometrien sind weitere Halterungen (4) auf Anfrage verfügbar.
Der Sensor (1) dient zur optischen Nahtführung des Schweißbrenners beim Schweißen.
Zur Nahtführung wird mit mehreren Lichtbalken die Nahtform am Fügestoß berührungslos abgetastet. Die
aktuelle Nahtposition, Informationen über Spaltmaß und Kantenversatz am Fügestoß sowie die
Orientierung des Schweißwerkzeugs relativ zur Bauteiloberfläche werden als Messwerte erfasst und an die
Robotersteuerung gesendet. Das Messprinzip mit drei Linien liefert zusätzlich auch die Neigung in
Vorschubrichtung und den Drehwinkel an die jeweilige Maschinen- oder Robotersteuerung.
EN
The support (4) can be adjusted in the axes A and B as well as in the directions +X and -X.
All torch necks of series ABIROB®Aand W(standard version, all angles) can be used. For the geometries
of the special torches there are further supports (4) available on request.
The sensor (1) is designed for the optical seam tracking of the welding torch during welding.
One or more light beams are used during the seam tracking to sense the shape of the seam along the joint
without actually touching it.. Key variables - the current seam position, gap dimensions, joint edge offset as
well as the positioning of the welding tool relative to the workpiece surface - are recorded and transmitted
to the robot controls. The measuring principle with three lines provides additionally the inclination in the feed
direction and the rotation angle at the corresponding machine and robot control system.