A111-003 Pulsed Coherent Radar
Operational description and User manual
Page 3 of 36 2022-01-04 © 2021 Copyright by Acconeer
Table of Contents
1Revision History............................................................................................................................ 4
2Description..................................................................................................................................... 5
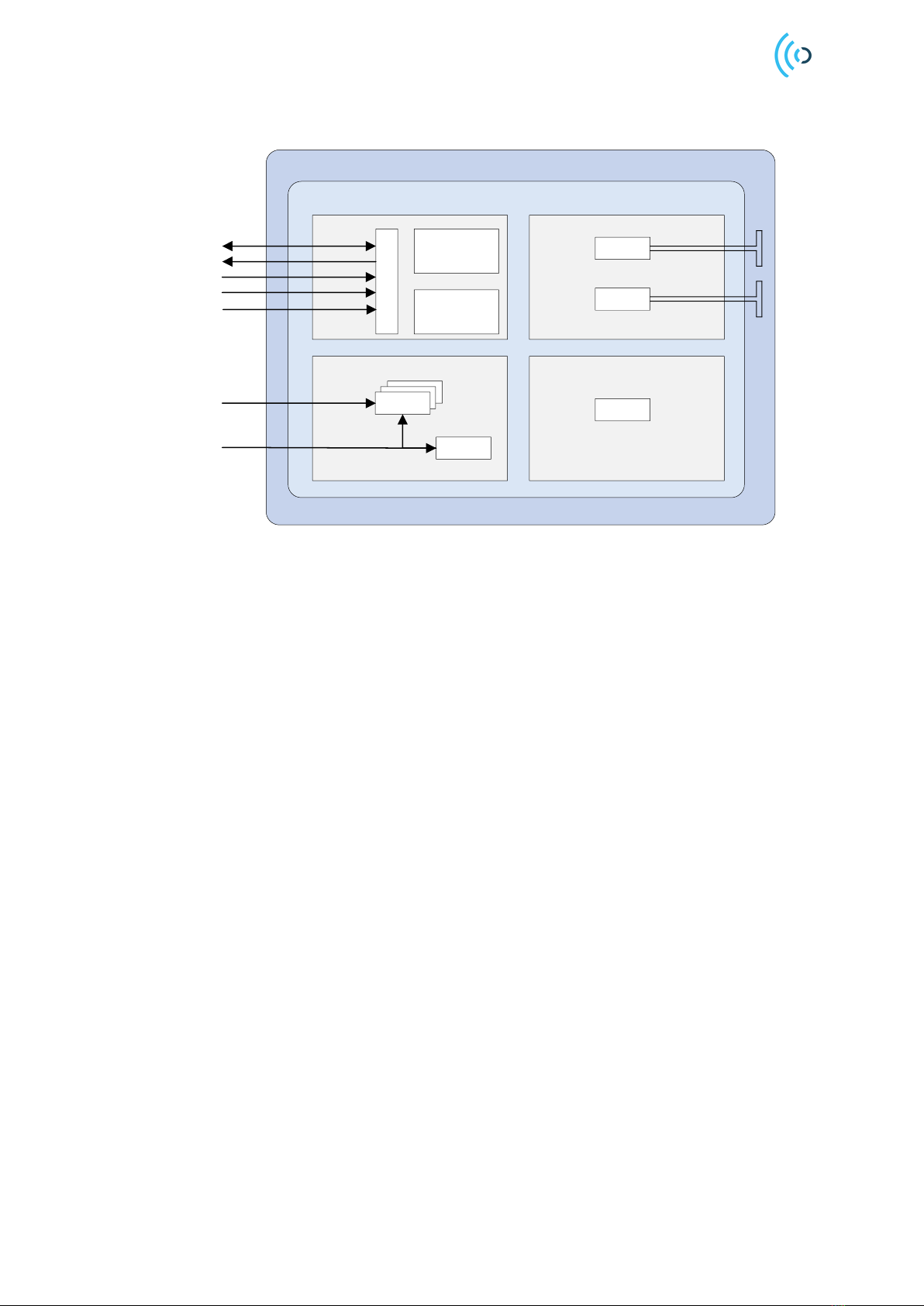
2.1 Functional Block Diagram ................................................................................................... 6
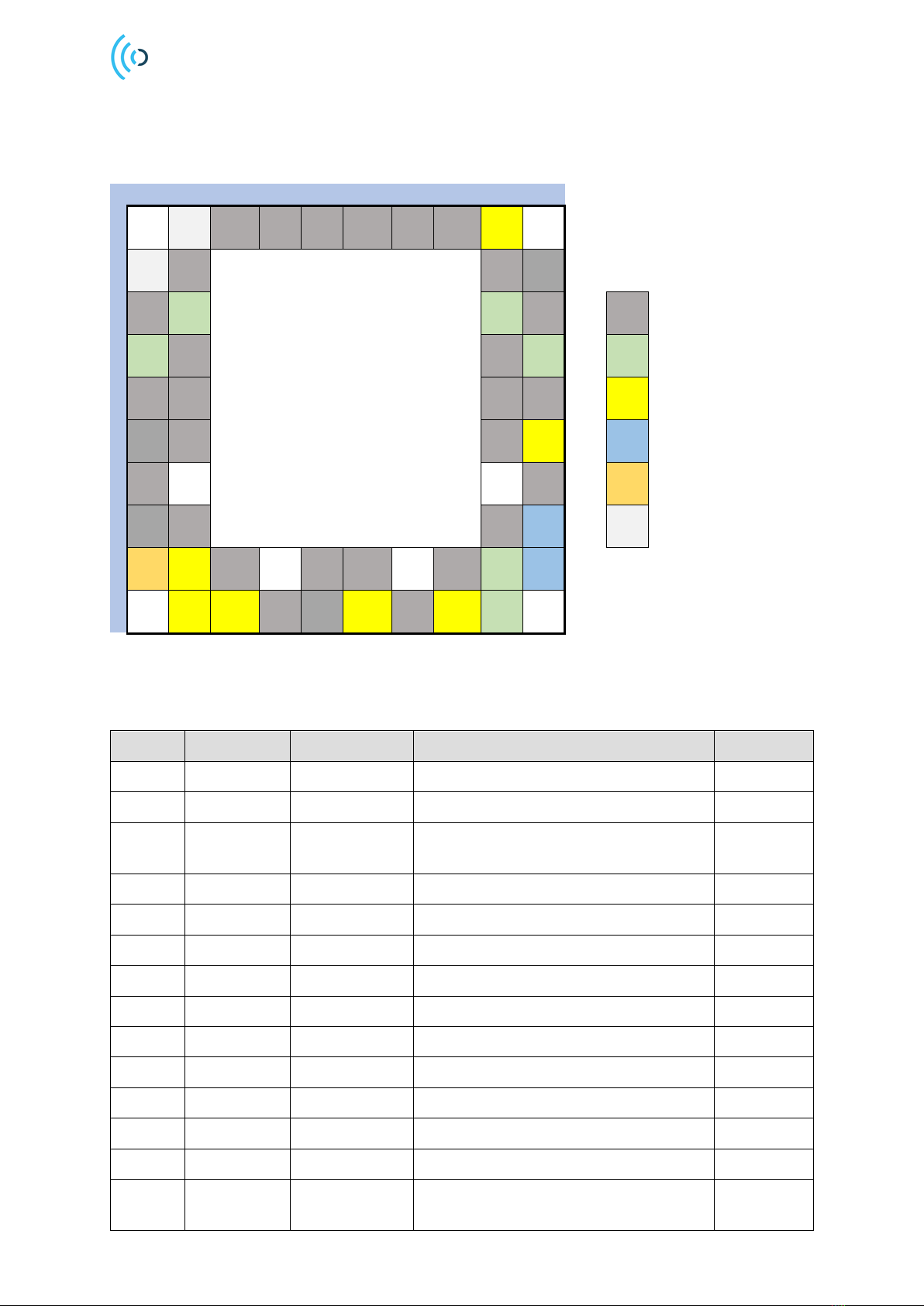
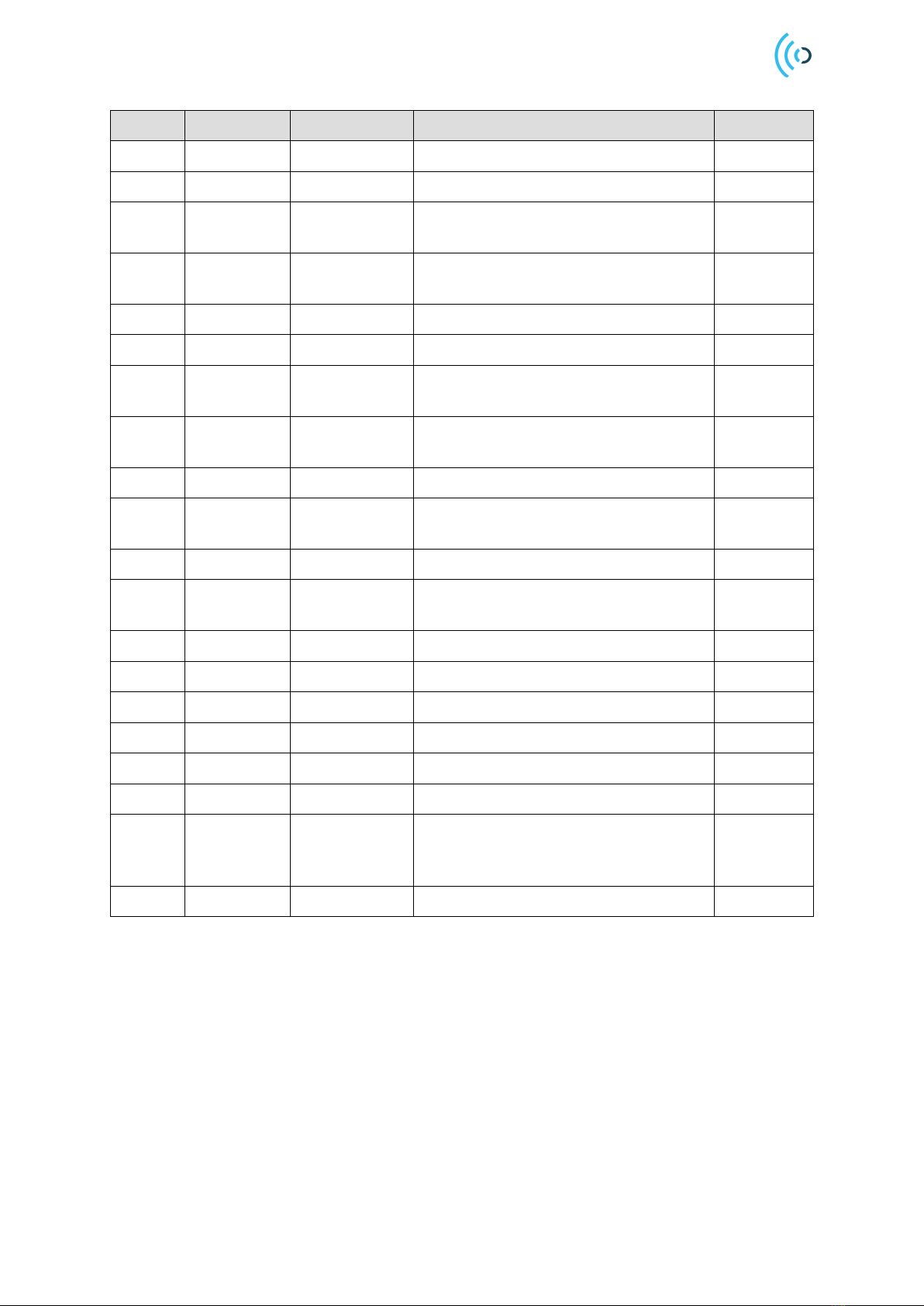
3Pin Configuration and Functions................................................................................................ 7
4Specifications................................................................................................................................ 9
4.1 Absolute Maximum Ratings ................................................................................................ 9
4.2 Environmental Sensitivity .................................................................................................... 9
4.3 Recommended Operating Conditions............................................................................. 10
4.4 Electrical Specification....................................................................................................... 10
4.5 Power Consumption Summary......................................................................................... 11
5Timing Requirements................................................................................................................. 13
5.1 Serial Peripheral Interface................................................................................................. 13
6Typical Characteristics............................................................................................................... 15
6.1 Radar Loop Gain Pattern................................................................................................... 15
6.2 Relative Phase Accuracy................................................................................................... 16
7Functional Description ............................................................................................................... 17
7.1 Acconeer Software............................................................................................................. 18
7.2 Software Integration........................................................................................................... 18
7.3 Power Sequences............................................................................................................... 19
8Layout Recommendations......................................................................................................... 22
8.1 Bill of Material (BoM).......................................................................................................... 23
8.2 XTAL..................................................................................................................................... 24
8.3 External Clock Source ....................................................................................................... 25
8.4 Power Supply...................................................................................................................... 26
9Regulatory Approval................................................................................................................... 28
9.1 ETSI...................................................................................................................................... 28
9.1.1 EU type examination certificate.................................................................................... 28
9.2 Declaration of conformity FCC ......................................................................................... 29
9.2.1 Host integrator instructions ........................................................................................... 30
10 Mechanical Data..................................................................................................................... 32
10.1 Moisture Sensitivity Level and Recommended Reflow Profile.................................... 34
10.2 RoHS and REACH Statement.......................................................................................... 34
11 Abbreviations........................................................................................................................... 35
Disclaimer............................................................................................................................................ 36