A111 Pulsed Coherent Radar (PCR)
Datasheet, v1.8
Page 3 of 34 2019-06-12 © 2019 Copyright by Acconeer
Table of Contents
1Revision History........................................................................................................................................... 4
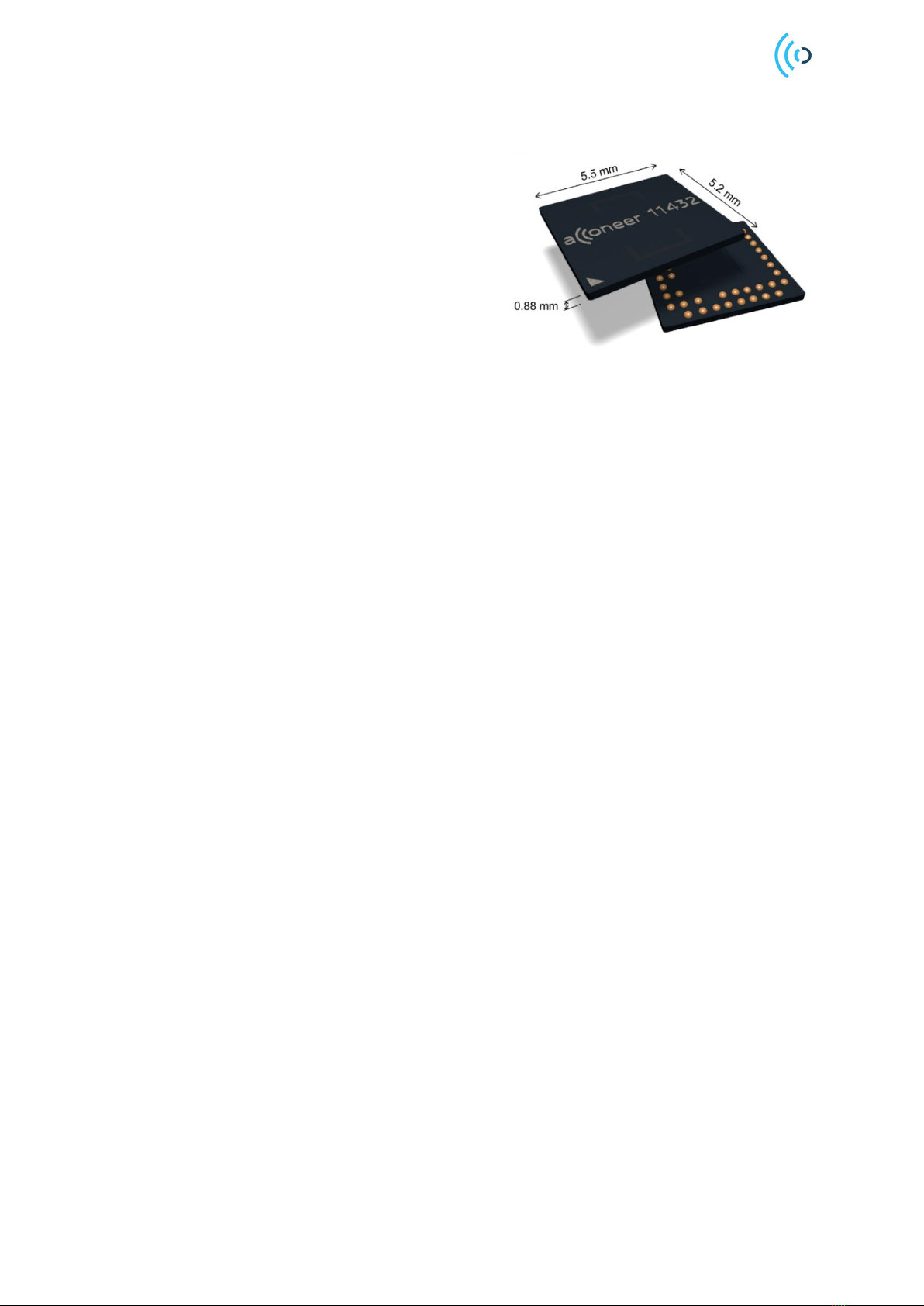
2Description.................................................................................................................................................... 5
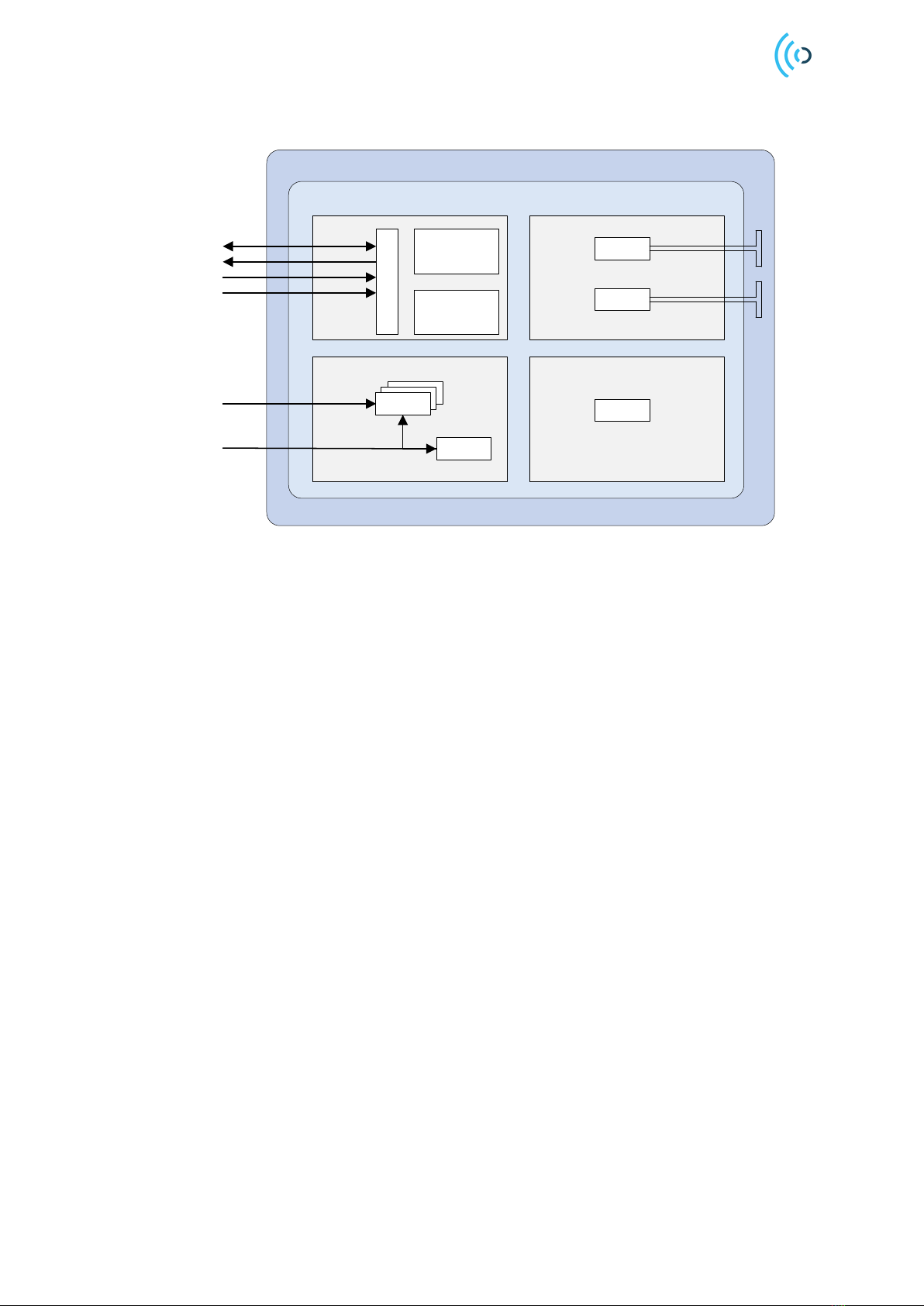
2.1 Functional Block Diagram.................................................................................................................. 6
3Pin Configuration and Functions............................................................................................................... 7
4Specifications............................................................................................................................................... 9
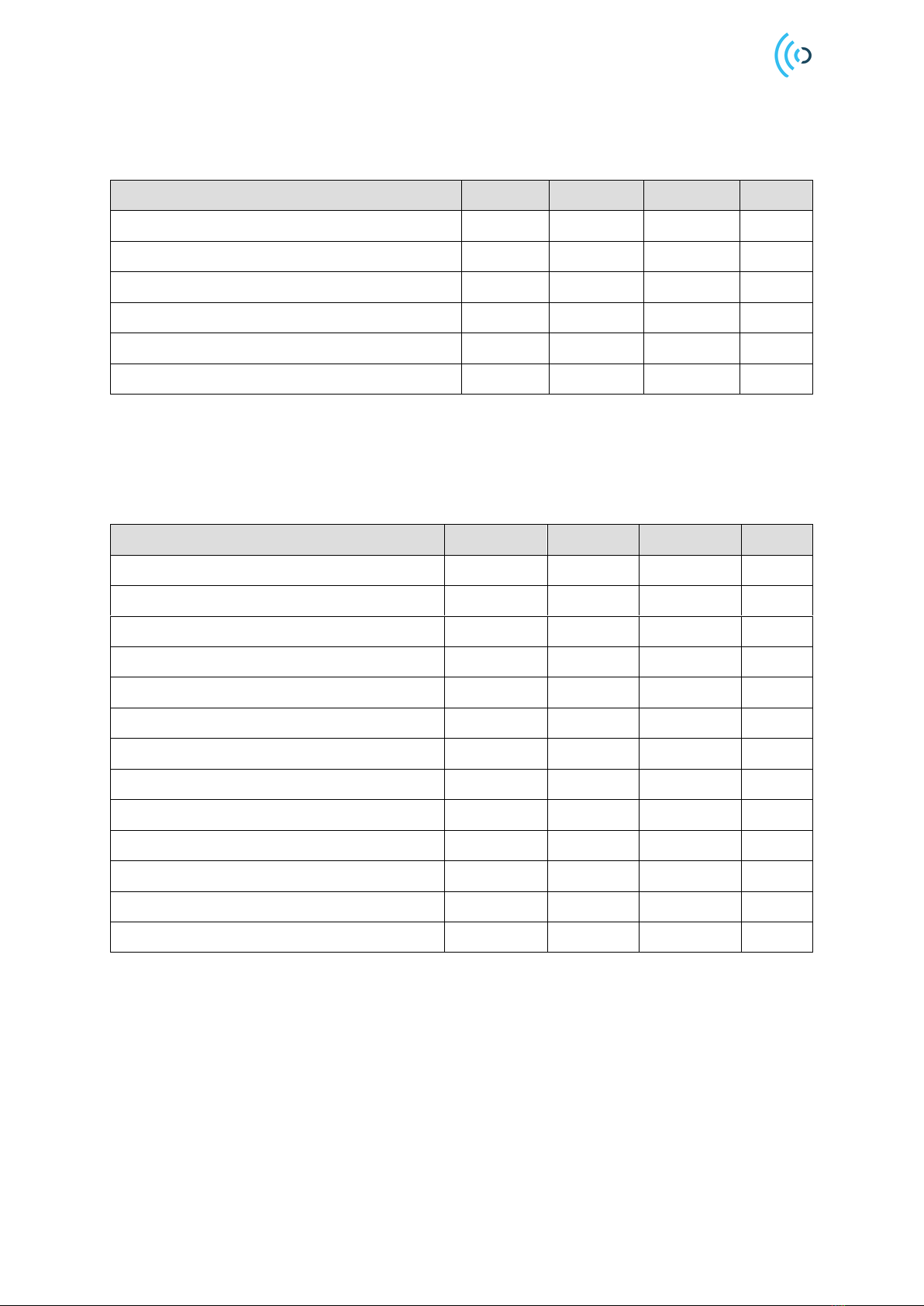
4.1 Absolute Maximum Ratings............................................................................................................... 9
4.2 Environmental Sensitivity................................................................................................................... 9
4.3 Recommended Operating Conditions............................................................................................ 10
4.4Electrical Specification ..................................................................................................................... 10
4.5 Power Consumption Summary....................................................................................................... 11
4.6 RF Specification................................................................................................................................ 11
5Timing Requirements.................................................................................................................................12
5.1 Serial Peripheral Interface............................................................................................................... 12
6Typical Characteristics...............................................................................................................................14
6.1 Distance Accuracy............................................................................................................................ 14
6.2 Amplitude Accuracy.......................................................................................................................... 15
6.3 Relative Phase Accuracy................................................................................................................. 15
6.4 Half Power Beamwidth (HPBW)..................................................................................................... 16
7Functional Description ...............................................................................................................................17
7.1 Acconeer Software ........................................................................................................................... 18
7.2 Software Integration ......................................................................................................................... 18
7.3 Power Up Sequence......................................................................................................................... 19
8Layout Recommendations.........................................................................................................................21
8.1 Bill of Material (BoM)........................................................................................................................ 22
8.2 XTAL................................................................................................................................................... 23
8.3 External clock source....................................................................................................................... 24
8.4 Power supply..................................................................................................................................... 25
9Regulatory Approval...................................................................................................................................27
9.1 ETSI.................................................................................................................................................... 27
9.1.1 EU declaration of conformity ..................................................................................................... 27
9.2 FCC Approval.................................................................................................................................... 28
9.2.1 FCC Regulatory Notes................................................................................................................ 28
9.2.2 FCC Grant Authorization............................................................................................................ 29
10 Mechanical Data.....................................................................................................................................30
10.1 Recommended Reflow Profile ........................................................................................................ 32
11 Abbreviations..........................................................................................................................................33
Disclaimer.............................................................................................................................................................34