Page 2 of 60
Safety Notes
This manual includes the important information to use this machine safely. This also includes
useful information to prevent injury or damage to property. Please read this manual carefully
prior to connecting or operating the J-CAT COMET.
Keep this manual near the machine at all times.
Supply only specified voltage
Do not connect to a power supply greater than the specified voltage. If voltage is exceeded,
electrical shock and /or damage to the unit may occur.
Make sure that the electrical outlet is properly grounded. If the outlet is not properly
grounded, electrical shock and/or damage to the unit may occur.
Working ambient temperature and relative humidity
This machine has been designed for use between 0~40 degrees C,10%~90%. Do not use
this machine exceeding these conditions.
Handle with care
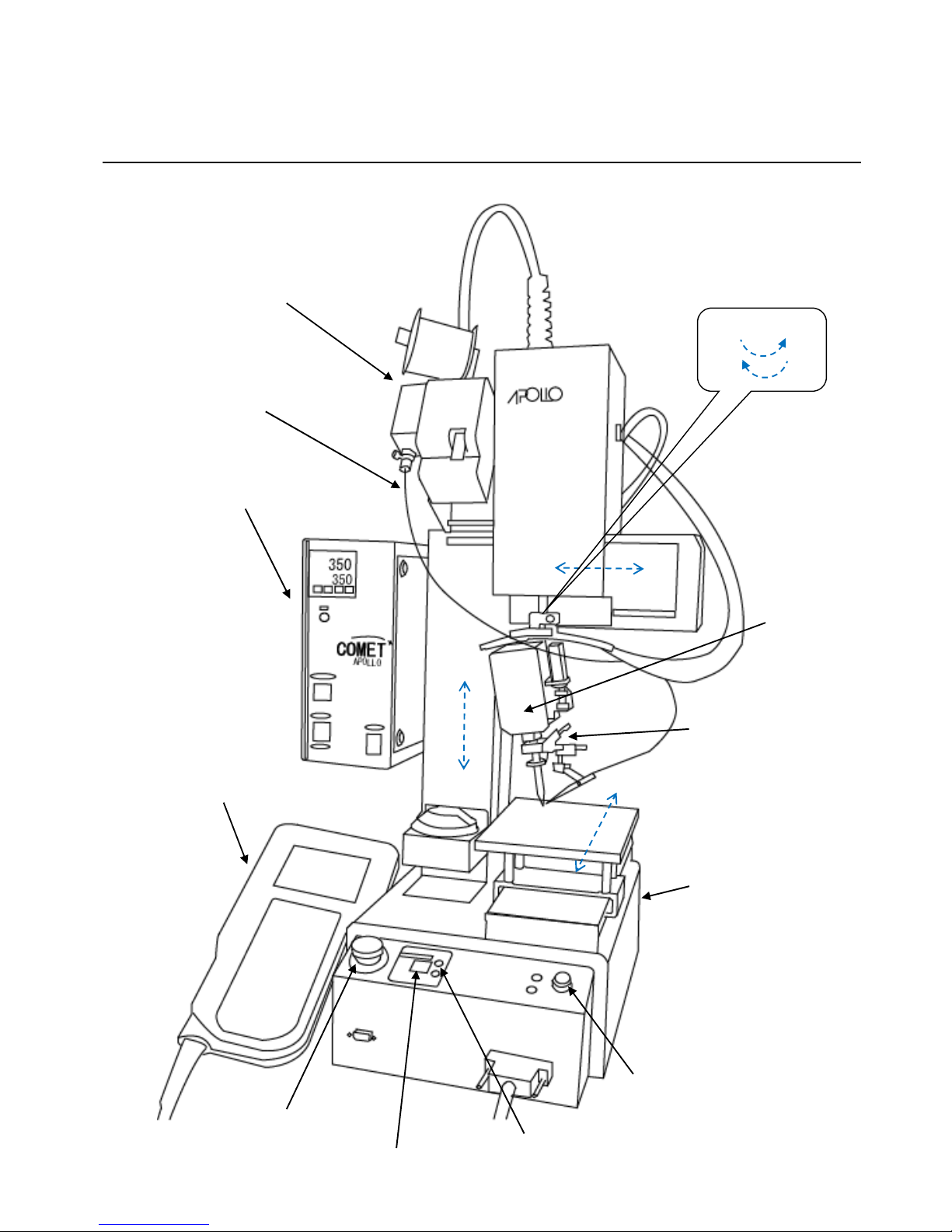
This machine is designed to use a solder feeder and hot iron for soldering.
Touching a heated soldering iron will cause severe burns. Make sure the iron has cooled
down before you are touching it for replacing the iron cartridge.
Please handle this machine with care. If the machine is dropped or sustains great impact /
vibration, it may cause malfunction.
If you do not use the machine for a long time
Please turn off the power, remove the power cable and keep it in a dry and cool place.
If you note malfunction on machine
If the machine malfunctions, turn off the power immediately and contact the dealer you
purchased the machine from.
Immunity from responsibility
We do not take responsibility for damage caused by misuse, mistakes, accidents, use in
abnormal conditions or natural disasters, such as in an earthquake, a fire etc.
We do not take responsibility on contingency loss,(Business loss, Business stop) caused
by machine stop.
We do not take responsibility for losses or damages caused by operating with other means
not mentionined in this manual.
We do not take responsibility for losses or damages caused by a wrong connection with
other equipment.
If for any reason the internal circuitry is tampered with altered or repaired without written
consent of Apollo Seiko, the warranty is null and void. The customer is allowed to make
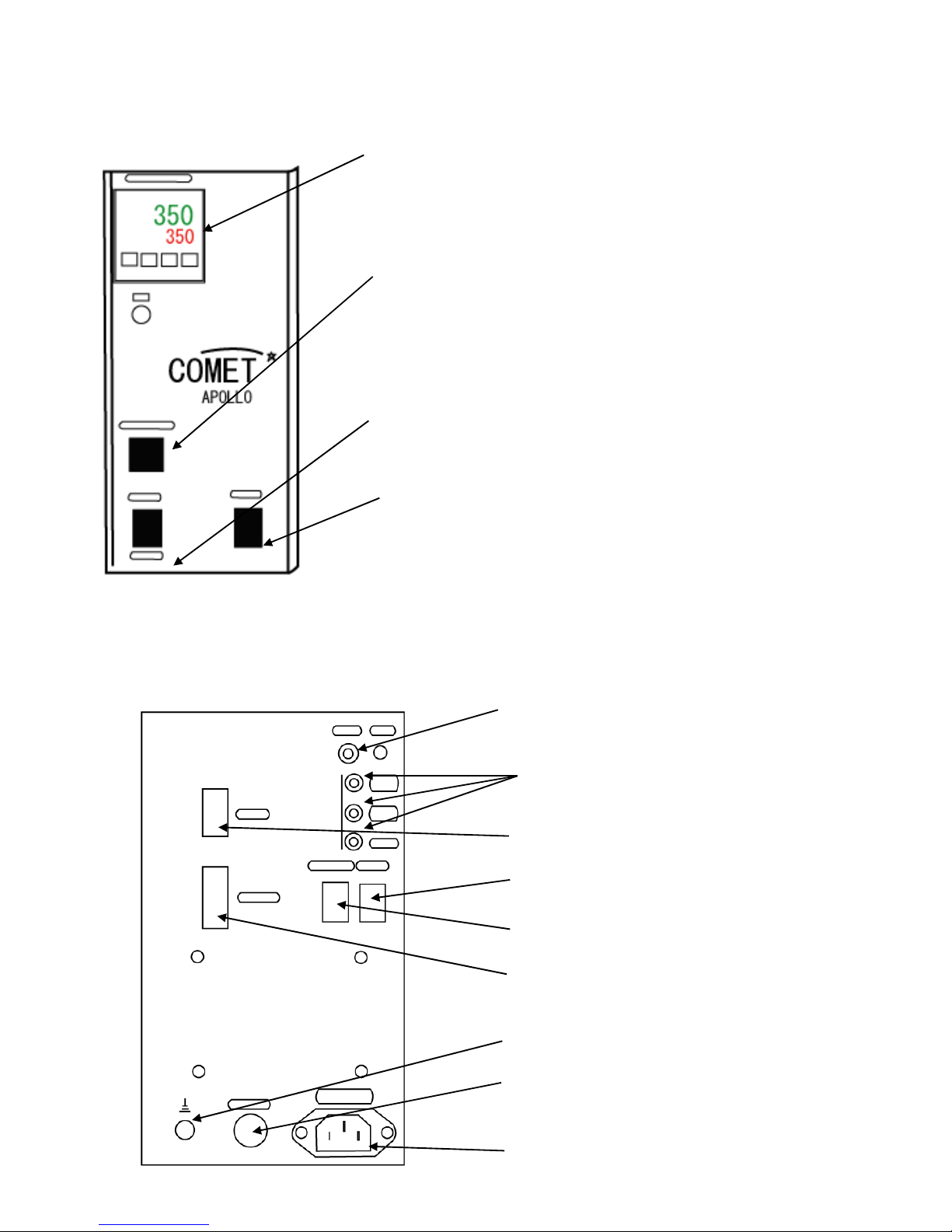
necessary tooling adjustments, replace solder iron tips and make any necessary
adjustments to the temperature controller.