TITAN-SVX-ETH Hardware Manual page 3 Rev 4.03
Table of Contents
1. INTRODUCTION ........................................................................................................................................ 4
1.1. TECHNICAL FEATURES ....................................................................................................................................5
2. ELECTRICAL AND THERMAL SPECIFICATIONS .................................................................................... 6
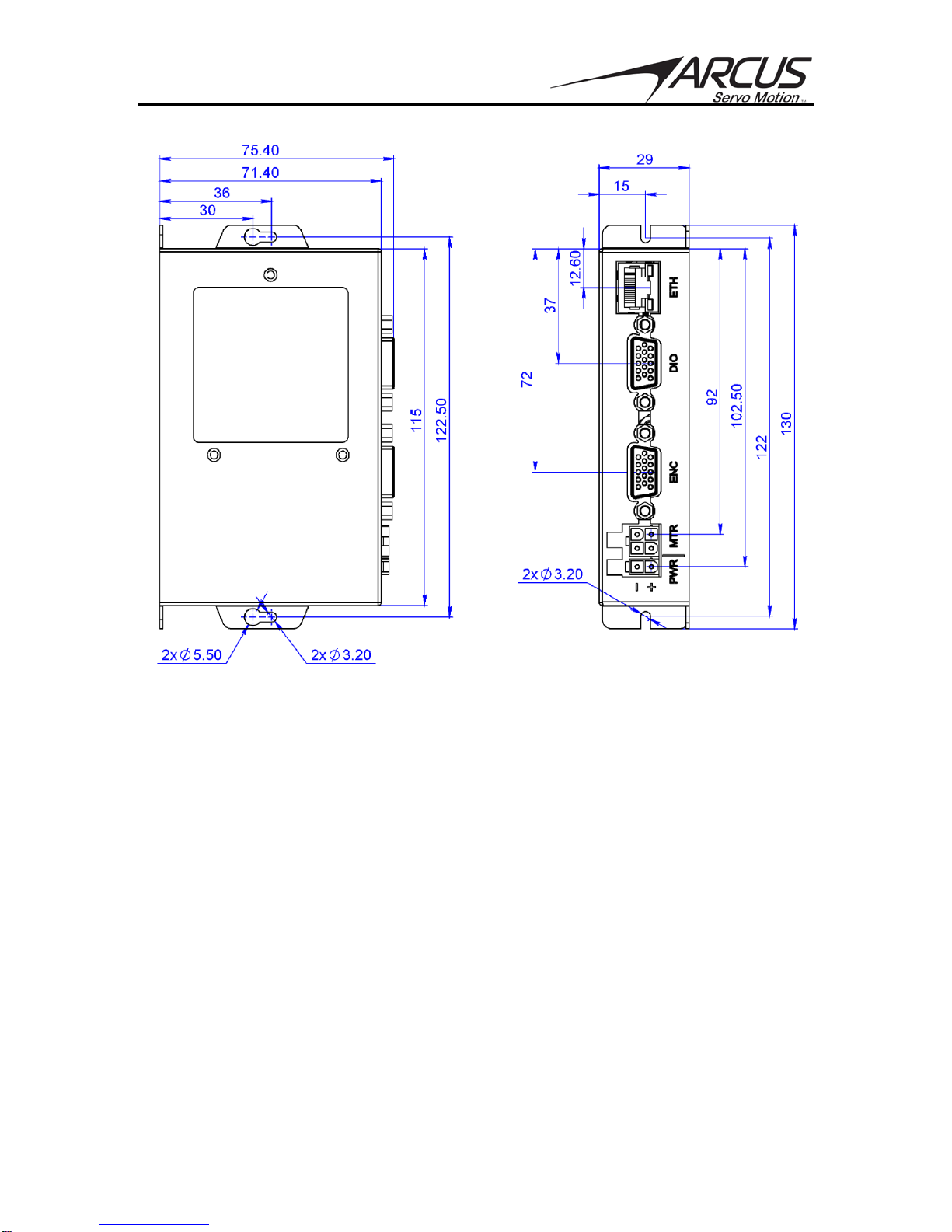
3. DIMENSIONS ............................................................................................................................................. 7
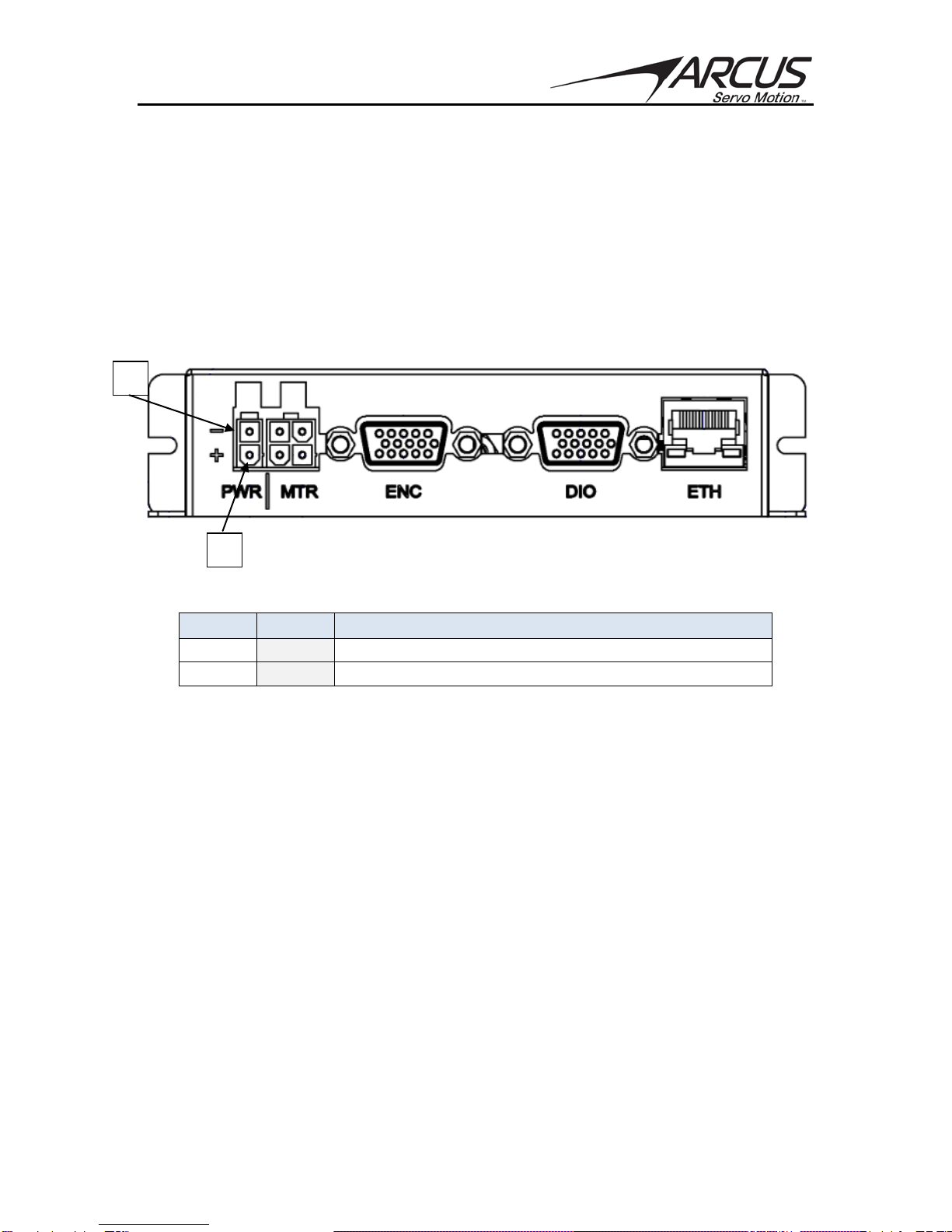
4. CONNECTIVITY ......................................................................................................................................... 8
4.1. 2-PIN POWER CONNECTOR............................................................................................................................8
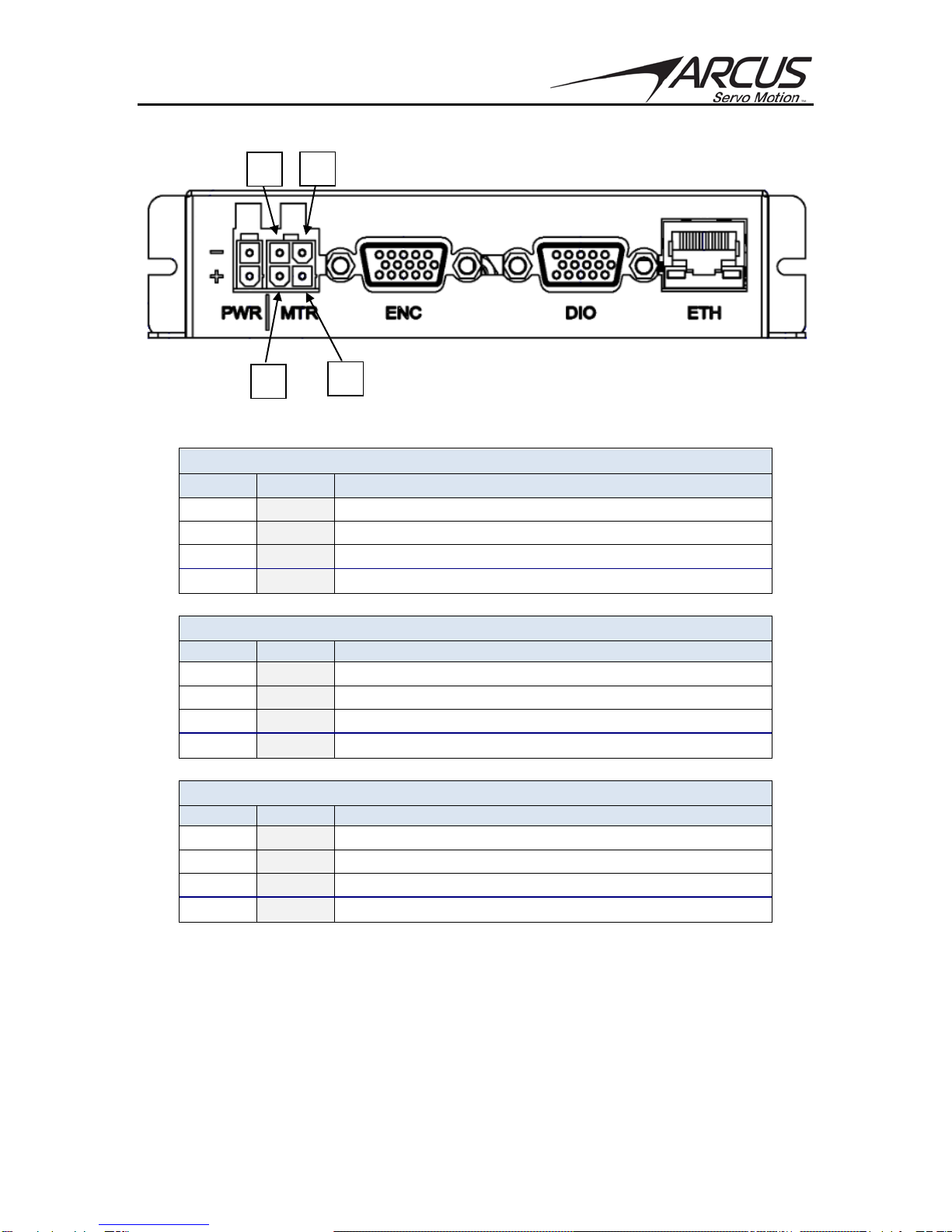
4.2. 4-PIN MOTOR CONNECTOR ...........................................................................................................................9
4.3. MALE DSUB15 (HD) ENCODER/HALL SENSOR CONNECTOR ............................................................11
4.3.1. Encoder Input Circuit.............................................................................................................................12
4.4. MALE DSUB15 (HD) MOTION I/O CONNECTOR .................................................................................. 13
4.4.1. Pulse / Direction (CW/CCW) Inputs................................................................................................14
4.4.2. Digital Outputs ..........................................................................................................................................15
4.5. 3-PIN COMMUNICATION CONNECTION .....................................................................................................16
4.6 USB COMMUNICATION CONNECTION.........................................................................................................16
5. COMMUNICATION....................................................................................................................................17
5.1 ETHERNET COMMUNICATION ......................................................................................................................17
5.1.1. Ethernet Settings......................................................................................................................................17
5.2. SERIAL COMMUNICATION............................................................................................................................ 17
5.2.1. Communication Port Settings ............................................................................................................17
5.2.2. Communicating from PC.......................................................................................................................17
5.2.3. RS-485 Communication Issues...........................................................................................................17
5.3. USB COMMUNICATION ................................................................................................................................ 18
5.3.1. Virtual Communication Settings.......................................................................................................18
5.4. WINDOWS GUI.............................................................................................................................................. 18