Page 5
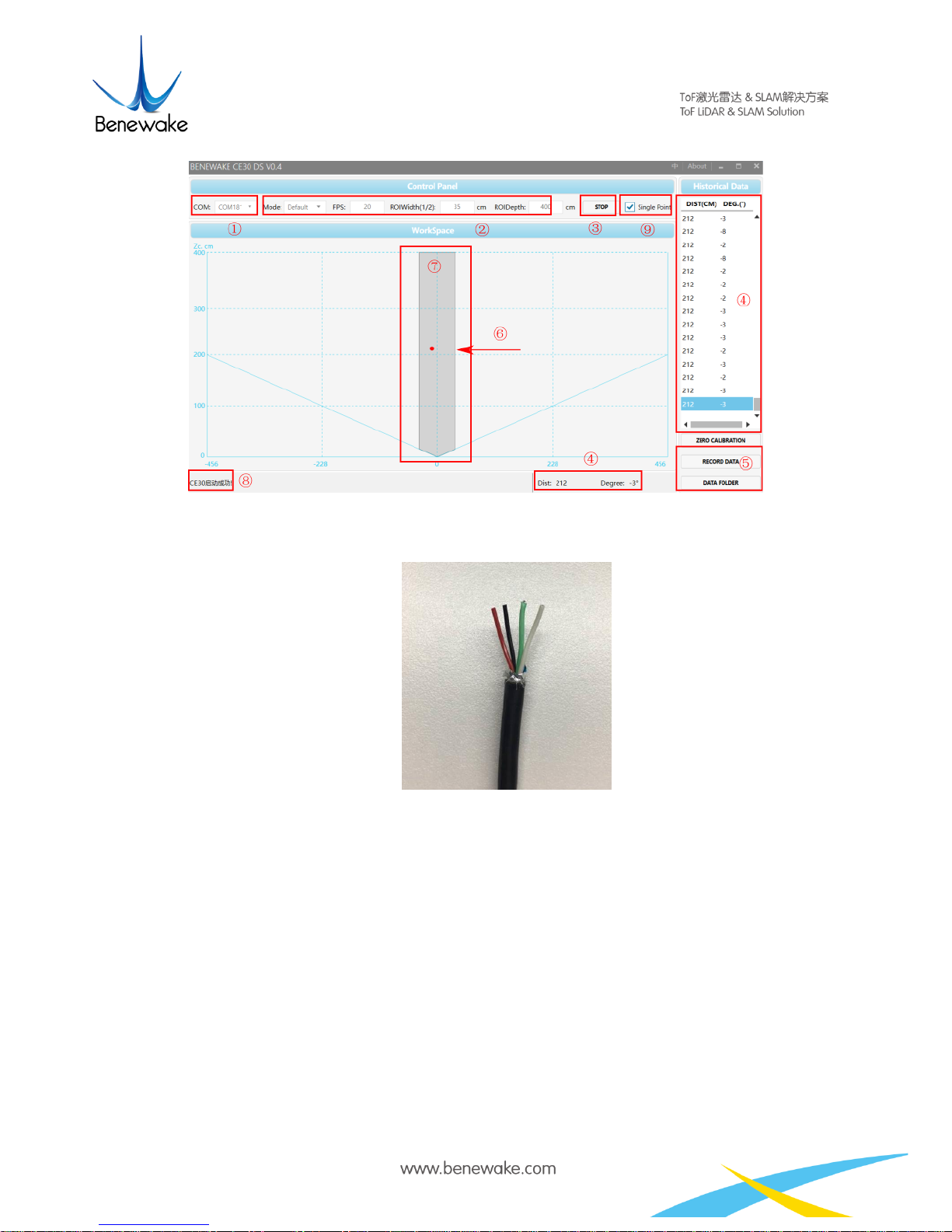
Fig. 4 Illustration of Software Functions
Note
①The software could automatically identify two kinds of UART: one for data and another is for
debugging information. Please choose appropriate UART number in accordance with
computer properties.
②Default setting of obstacle avoidance area is 35 cm in half-width of the ROI and 400 cm in
depth.
③Start/ stop test button
④View data by rolling the window
⑤Button of data recording (In unit of minute. When multiple clicks of the button within one
minutes, only the data of the last click will be recorded.)
⑥Position of the nearest obstacle detected by LiDAR
⑦Obstacle avoidance region: with presence of an object, as shown in Fig. 4 above, the software
will label the area between LiDAR and the obstacle as the safe zone with coloring, or else the
background will be white.
⑧Running state
⑨Single-point mode
If the single-point mode is chosen, as shown in Fig. 5 below, the software will indicate the specific
position of the obstacle in ROI. (Instruction: during the measurement of a wide flat obstacle, the
output angle might be the angle of any point on the object, because the LiDAR only outputs one
point.)