2
Table of Contents
1. General Description .......................................................................................................................................... 3
2. Specifications .................................................................................................................................................... 4
2.1 Electrical............................................................................................................................................. 4
2.2 Physical.............................................................................................................................................. 5
3. Installation ......................................................................................................................................................... 6
3.1 Control Installation ............................................................................................................................. 6
3.2 Wiring Guidelines............................................................................................................................... 6
4. Terminal Connections & Functions ................................................................................................................... 7
4.1 AC Power Connections ...................................................................................................................... 7
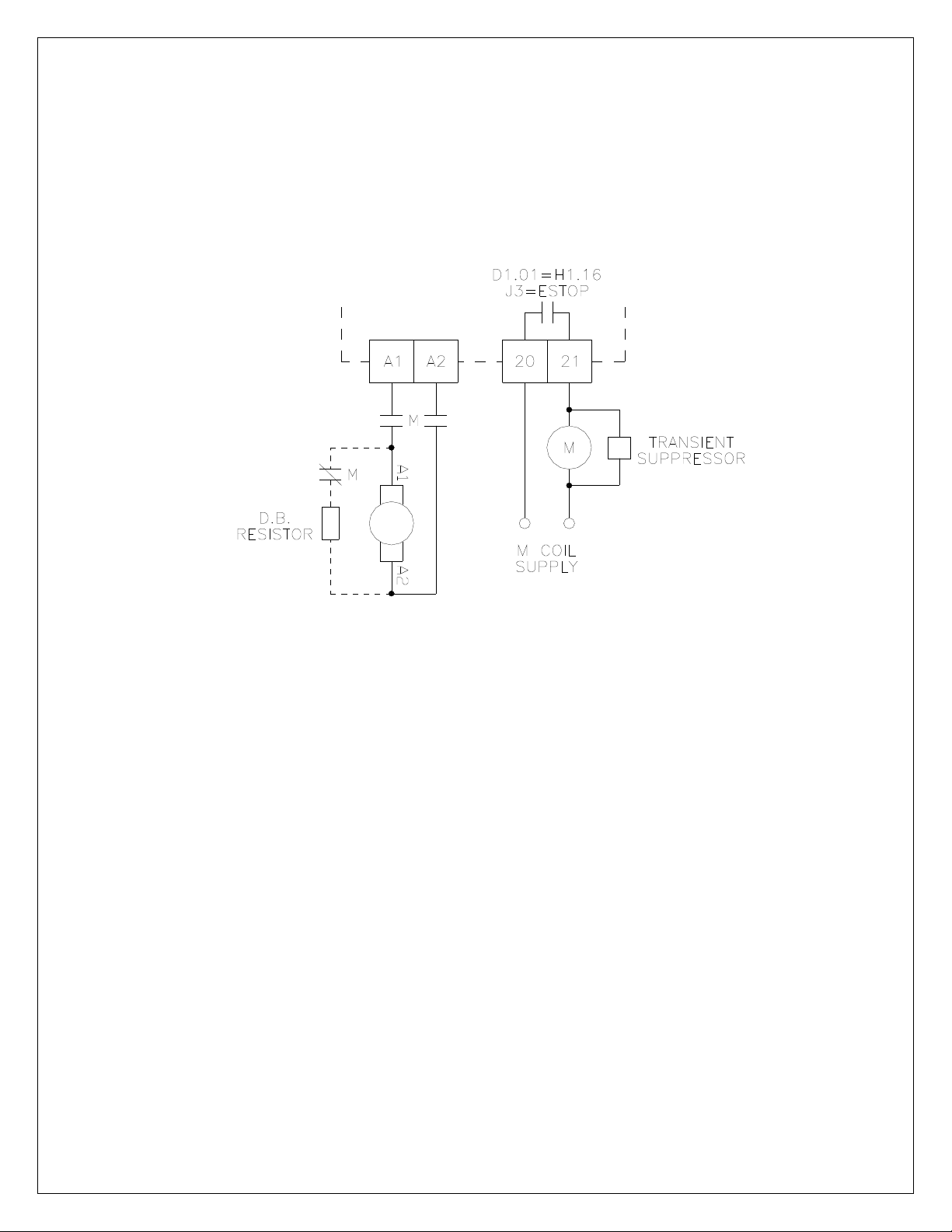
4.2 Motor Connections ............................................................................................................................. 8
4.3 Signal Connections .......................................................................................................................... 10
5. Human Machine Interface (HMI)..................................................................................................................... 12
5.1 Description of Interface .................................................................................................................... 12
6. Start Up Procedure ......................................................................................................................................... 15
6.1 Pretest.............................................................................................................................................. 15
6.2 Adjustment Procedure: Velocity (Speed) Regulator.........................................................................15
6.3 Adjustment Procedure: Torque (Current) Regulator........................................................................16
6.4 Calibration & Fine Tuning.................................................................................................................16
6.5 Password Protection ........................................................................................................................ 17
7. Programming & Adjustments .......................................................................................................................... 18
7.1 A: Options ........................................................................................................................................ 18
7.2 B: Digital Inputs ................................................................................................................................ 19
7.3 C: Analog Inputs............................................................................................................................... 24
7.4 D: Digital Outputs ............................................................................................................................. 27
7.5 E: Analog Outputs ............................................................................................................................ 29
7.6 F: Motor Data ................................................................................................................................... 31
7.7 G: Control Loops .............................................................................................................................. 33
7.8 H: Start/Stop Logic ........................................................................................................................... 38
7.9 I: Setpoints ....................................................................................................................................... 42
7.10 J: Ramps........................................................................................................................................ 44
7.11 K: Fault Logic ................................................................................................................................. 48
7.12 L: Applications................................................................................................................................ 53
7.13 M: Thresholds ................................................................................................................................ 63
7.14 N: Timers ....................................................................................................................................... 64
7.15 O: Logic Gates ............................................................................................................................... 66
7.16 P: Switches .................................................................................................................................... 69
7.17 Q: Internal Links ............................................................................................................................. 70
7.18 R: Communications........................................................................................................................ 71
7.19 S: Zero Speed ................................................................................................................................ 74
7.20 T: System ....................................................................................................................................... 75
7.21 U: Auxiliary ..................................................................................................................................... 77
7.22 Parameter Table ............................................................................................................................ 78
8. Troubleshooting .............................................................................................................................................. 90
9. Spare Parts ..................................................................................................................................................... 92
9.1 Printed Circuit Assemblies ............................................................................................................... 92
9.2 Fuses ............................................................................................................................................... 92
10. Prints ............................................................................................................................................................. 93
D14605 Control Board Assembly........................................................................................................... 93
D14602 Regulator Board Assembly....................................................................................................... 94
D14599 Power Board Assembly ............................................................................................................ 95
C14608 Keypad Board Assembly .......................................................................................................... 96
C14701 General Connections................................................................................................................ 97
D14702 Software Block Diagram ........................................................................................................... 98
11. Standard Terms & Conditions of Sale......................................................................................................... 103