1. Specifications
[SMF-2008-A] – 1-3 –
1.3. Performance Specifications of Driver
Item Description
Number of Controlled
Axes
1 axis, 4,194,304 pulses/rotation
Angle Setting Unit ° (degree), pulse, and number of indexes
Angle Setting Minimum
Unit
0.001°, 1 pulse (= about 0.31 sec [0.000086 deg.])
Speed Setting Unit sec, rpm
Speed Setting Range 0.01 to 100 sec/0.11 to 240 rpm
Number of Indexes 1 to 255
Maximum Instruction
Value
8 digit input ±99,999,999
Timer 0.01 to 99.99sec
Programming Language NC language
Programming Method Data setting through RS-232C port using PC
Operation Mode Auto, single block, MDI, jog, servo OFF
Pulse string input, network operation mode
Coordinate Absolute and incremental
Acceleration Curve
Modified sine (MS), Modified constant velocity (MC, MC2)
Modified trapezoid (MT), Trapecloid (TR)
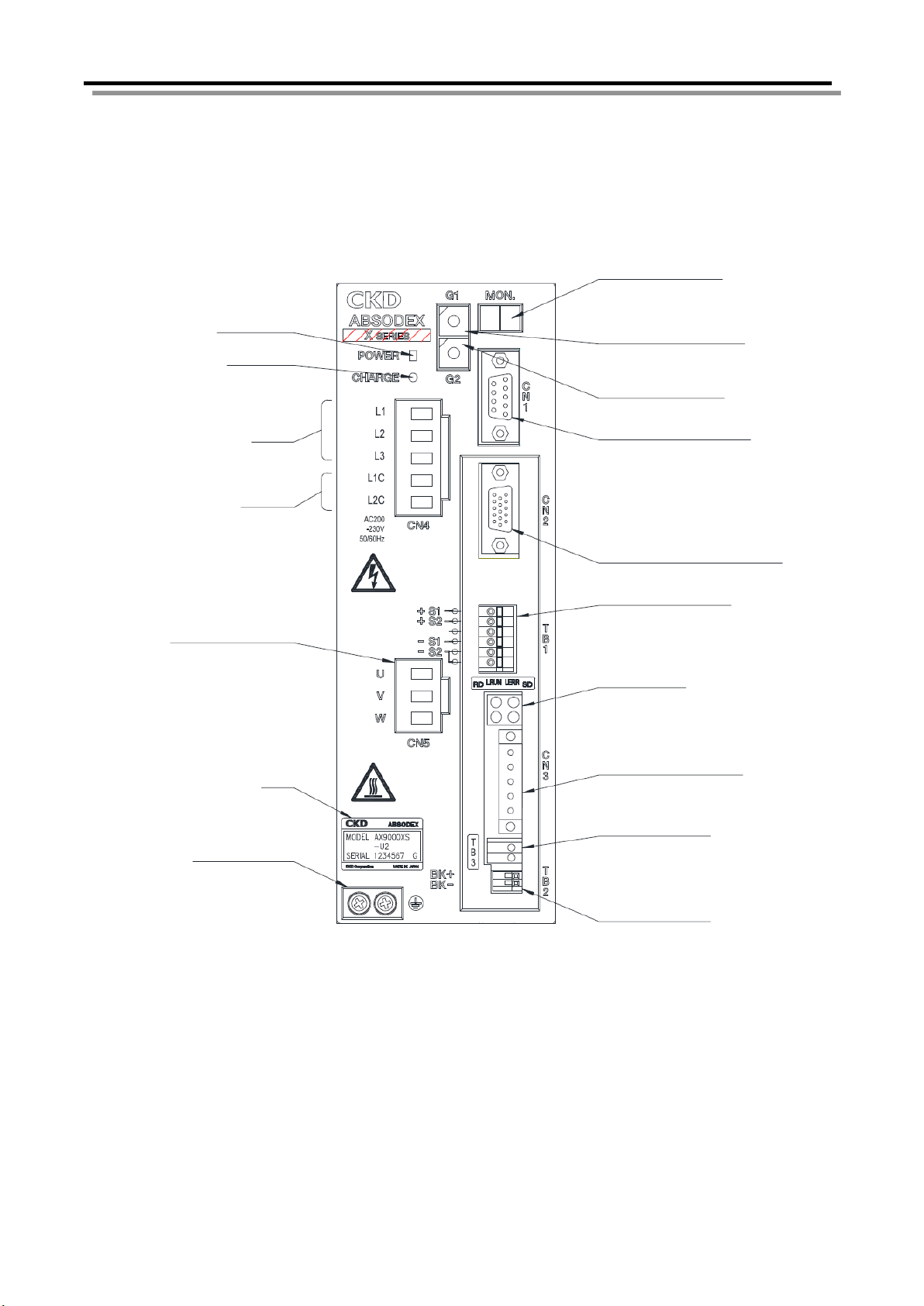
Status Display LED power lamp display
Motion Display
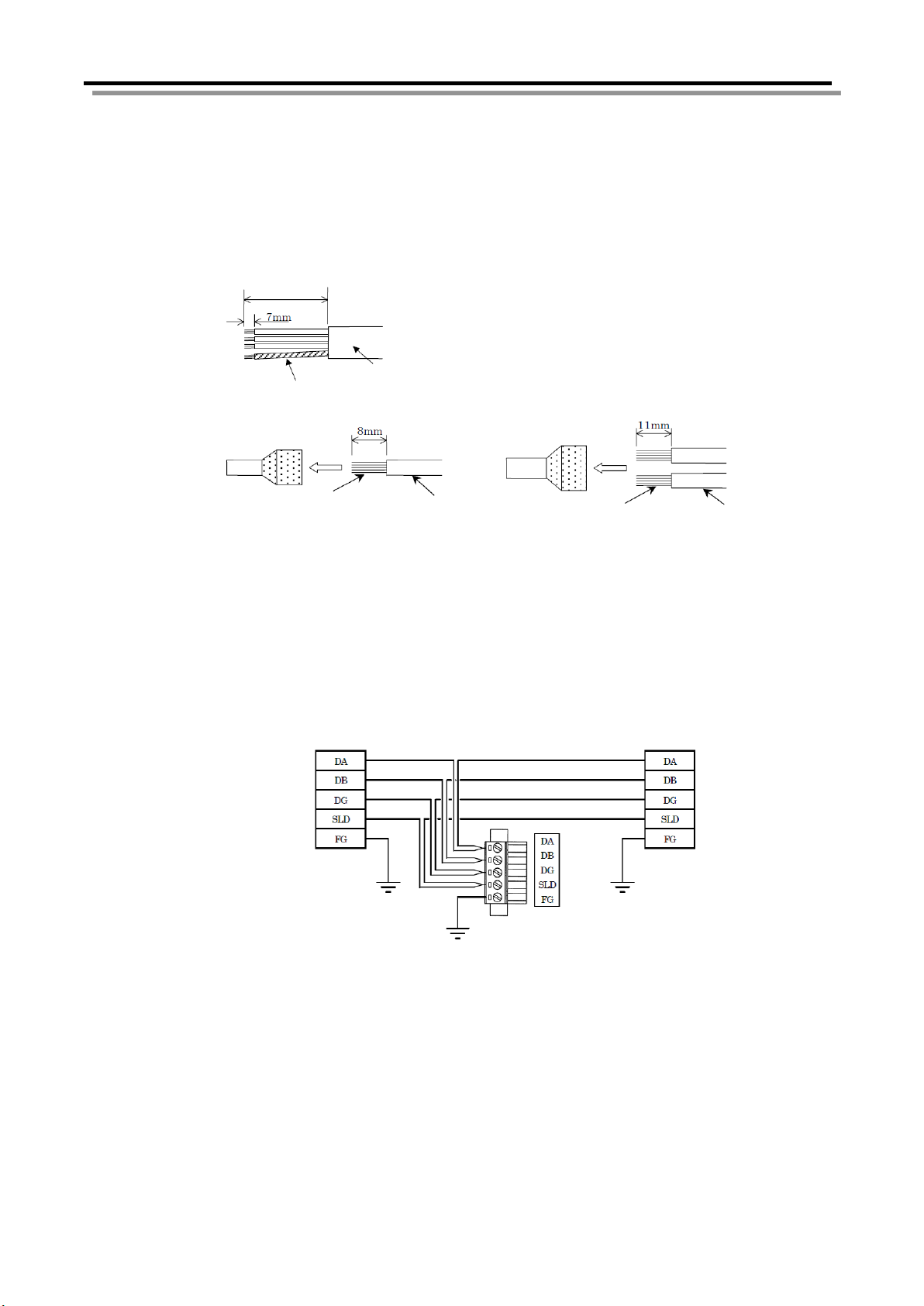
Meets RS-232C specification
CC-Link Communication
Function
(Ver. 1.10, 2 stations
occupied, remote device
station)
Home positioning instruction, reset, start, stop, continuous rotation
stop, emergency stop, answer, position deviation counter clear,
program number selection, brake release, servo ON, program
number setting, ready return
Alarm 1 and 2, positioning completion, in-position, standby for start
input, M code 8 points, output during indexing 1/2, home position
output, M code strobe, segment position strobe, servo status,
ready output
Program Capacity
<NC program>
About 6,000 characters (256 pcs.)
<Point table>
Protects the actuator from being overheated.