3
Table of Contents
1Overview .................................................................................................................4
2Laser Safety............................................................................................................6
2.1 General Information ..........................................................................................6
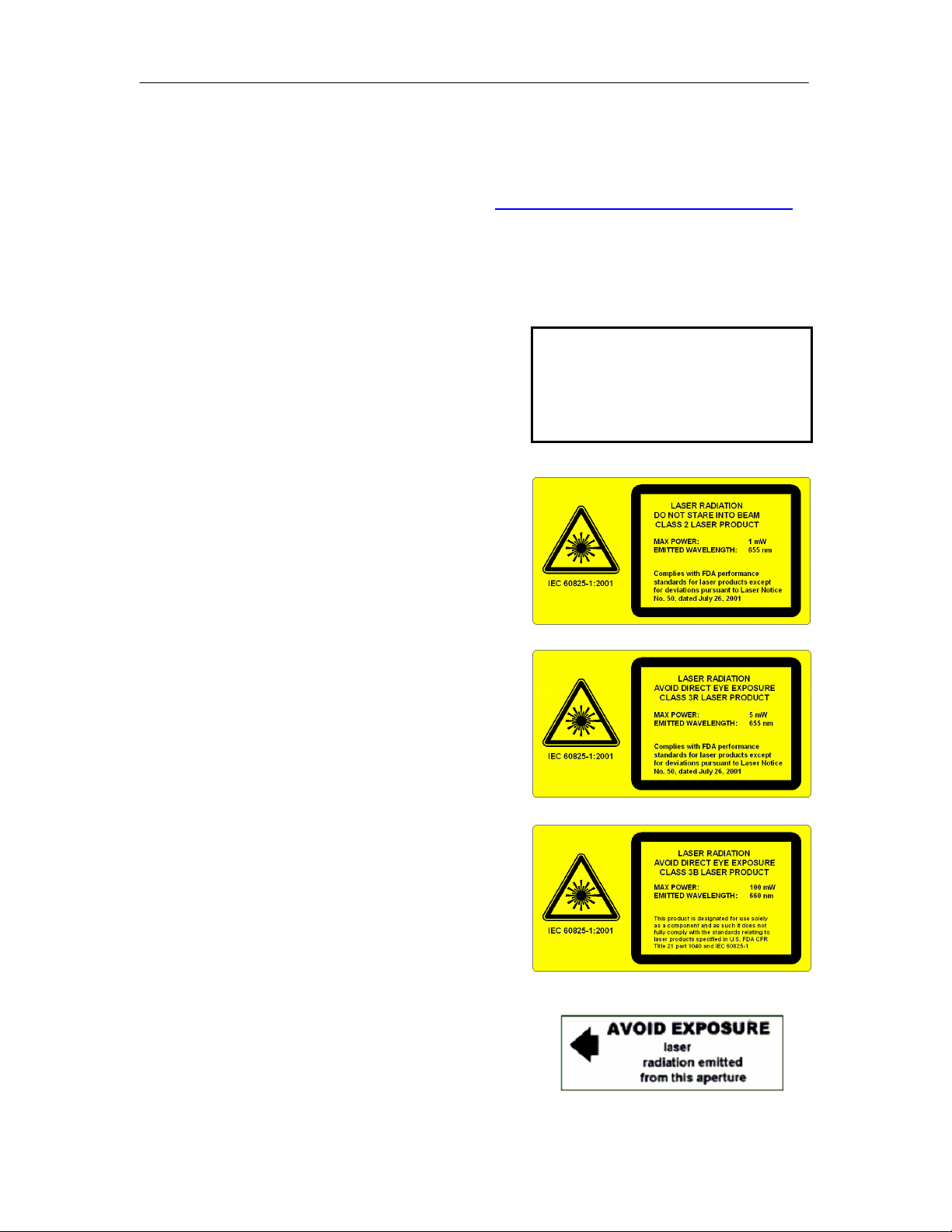
2.2 Laser Classification...........................................................................................7
2.2.1 Laser Classes ..........................................................................................7
2.2.2 User Precautions & OEM Responsibilities................................................8
2.2.3 Class 3B/lllb OEM Responsibilities...........................................................8
2.3 Requirements on laser systems sold or used in the USA ................................10
2.4 B800 laser safety specification........................................................................10
3Sensor Description ..............................................................................................11
3.1 General ...........................................................................................................11
3.2 Performance Specifications.............................................................................11
3.3 Electrical Power Requirements .......................................................................11
3.4 Dimensions .....................................................................................................12
4Maintenance .........................................................................................................13
4.1 Preventative Maintenance Procedures............................................................13
4.2 Welding and the Scanner Frame.....................................................................13
5Connecting the Hardware....................................................................................14
5.1 Connection Overview ......................................................................................14
5.2 Mounting .........................................................................................................15
5.2.1 Sensor Positioning .................................................................................15
5.2.1.1 Relative to the Target...................................................................................... 15
5.2.1.2 Relative to other sensors ................................................................................ 16
5.2.2 Chain Spacing........................................................................................17
5.3 Cabling/Power.................................................................................................19
5.3.1 Connector and Cable Part Numbers.......................................................20
6OEM Design..........................................................................................................21
6.1 Design Requirements......................................................................................21
6.1.1 System Calibration .................................................................................21
6.1.1.1 Determine Laser Alignment Offset/Delay........................................................ 21
6.1.1.2 Determine Range Offset ................................................................................. 21
6.2 Design Recommendations ..............................................................................22
6.2.1 Sensor Mounting....................................................................................22
6.2.2 Baffle Plates...........................................................................................22
6.2.3 Photocells ..............................................................................................23
6.2.4 Scanner Frame ......................................................................................23
7Getting Started .....................................................................................................24
7.1 Powering up....................................................................................................24
7.2 Connecting......................................................................................................25
7.3 Sensor Diagnostics .........................................................................................26
7.4 Application development .................................................................................26
7.5 Ranges ...........................................................................................................27
8Warranty ...............................................................................................................28
8.1 Warranty policies.............................................................................................28
8.2 Return policy...................................................................................................28
9Getting Help..........................................................................................................29