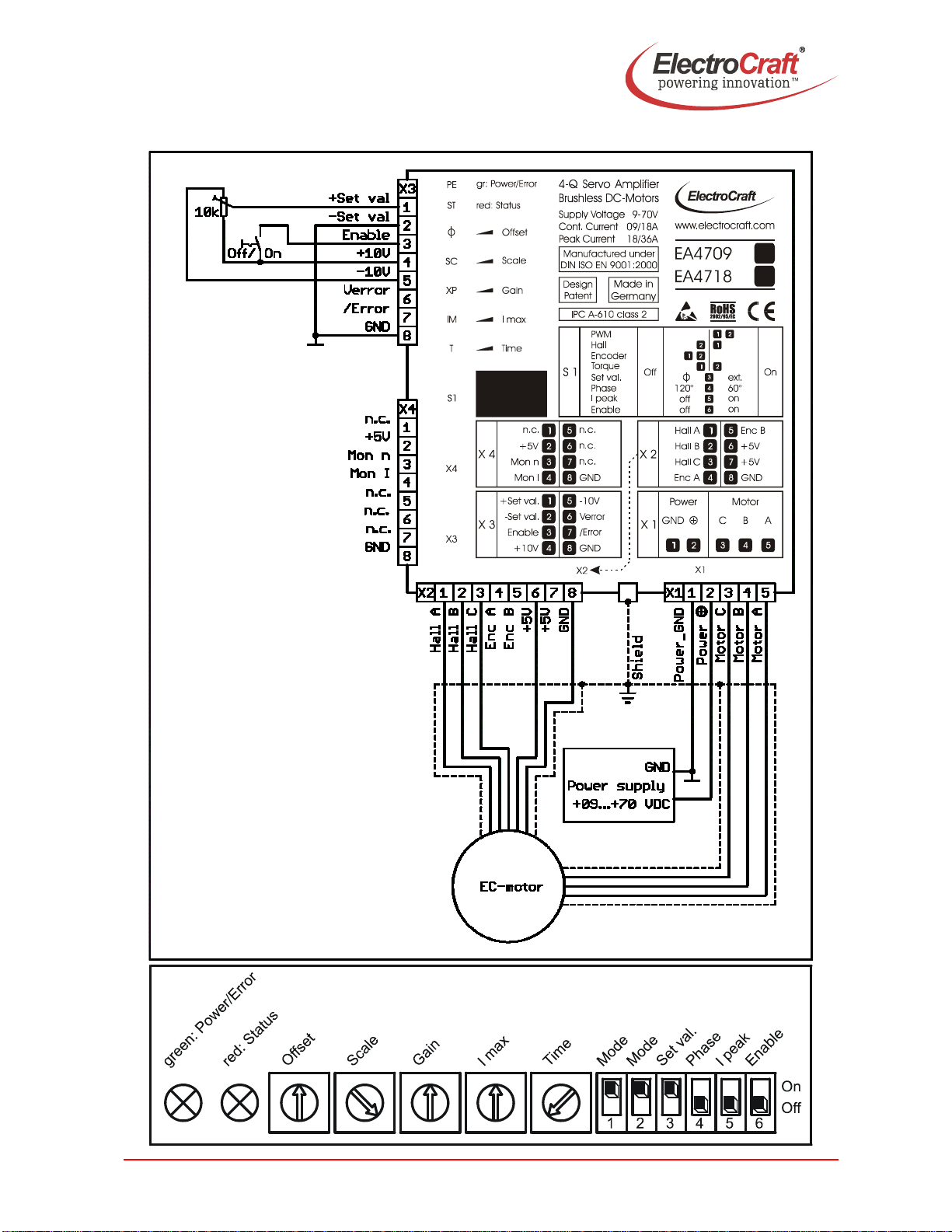
Electro-Craft EA4709 User manual















This manual suits for next models
1
Table of contents
Other Electro-Craft DC Drive manuals





Popular DC Drive manuals by other brands

GFA
GFA ELEKTROMAT SI 100.30 FU-55,00 10003917 10011 installation instructions

ABB
ABB ACS880-07 user manual

Selve
Selve Commeo SE Pro-RC quick start guide

GFA
GFA ELEKTROMAT SI 45.15-40,00 GA45/15GD installation instructions

Trane
Trane LonWorks TR1 Series VFD Installation instruction

YASKAWA
YASKAWA LA500 Installation and operation instruction







PiezoDrive
PiezoDrive PDUS210 quick start guide

GFA
GFA ELEKTROMAT FS 50.20-40,00 installation instructions

Bosch
Bosch Active Line Original operating instructions

MacDon
MacDon 279708 installation instructions

EUCHIPS
EUCHIPS EUP200AD-1H12V-0 quick start guide

Rockwell Automation
Rockwell Automation Allen-Bradley PowerFlex 755TS Series Hardware service