Force Dimension sigma.7 haptic device User manual

USER MANUAL
sigma.7 haptic device
version 1.4
Force Dimension
Switzerland
www.forcedimension.com

2

3
summary
The purpose of this document is
>to describe the setup of the sigma.7 haptic device
>to describe the installation of the software drivers and the Force Dimension SDK
>to describe the basic operation modes of the sigma.7 haptic device
glossary
SDK refers to the Software Development Kit (SDK) for all Force Dimension products.

4
5
table of contents
system overview 6
important safety instructions 7
setting up the sigma.7 haptic device 8
3.1 haptic device installation 8
3.2 installing the power supply 14
3.3 connecting the sigma.7 haptic device to your computer 14
3.4 software installation 14
configuring the sigma.7 under Windows 15
4.1 installing the software 15
4.2 installation description 15
4.3 installing the drivers 15
configuring the sigma.7 under Linux 16
5.1 installing the software 16
5.2 installation description 16
5.3 installing the drivers 16
configuring the sigma.7 under macOS 17
6.1 installing the software 17
6.2 installation description 17
6.3 installing the drivers 17
operating the sigma.7 18
7.1 coordinate system 18
7.2 operating modes 20
7.3 running the Haptic Desk program 21
7.4 running the demonstrations programs 22
technical information 25

6
system overview
figure 1 – overview of the sigma.7 haptic device
1. device stand rear leg
2. device stand front legs
3. device stand pole
4. haptic device controller
5. arms of translational base
6. rotational wrist
7. end-effector (force gripper handle)
8. pole interface
9. power switch
10. power connector
11. USB connector
12. extension I/O connector
7
1
10
8
2
3
12
5
4
11
9
6
7
important safety instructions
IMPORTANT
WHEN USING THIS HAPTIC DEVICE, BASIC SAFETY PRECAUTIONS
SHOULD ALWAYS BE FOLLOWED TO REDUCE THE RISK
OF FIRE, ELECTRICAL SHOCK, OR PERSONAL INJURY.
1. read and understand all instructions
2. follow all warnings and instructions marked on your haptic device
3. do not use or place your haptic device near water
4. place your haptic device securely on a stable surface
5. make sure that the workspace of your haptic device is free of objects
6. do not overload wall outlets and extension cords as this can result in a risk of fire or electri-
cal shock
7. switch off your haptic device when it is not in use
8. to reduce the risk of electrical shock, do not disassemble your haptic device

8
setting up the sigma.7 haptic device
This section describes the different steps to follow to safely setup your sigma.7 device before use.
IMPORTANT
PLEASE KEEP THE ORIGINAL PACKAGING
ONLY USE THE ORIGINAL PACKAGING DURING STORAGE OR SHIPMENT
3.1 haptic device installation
The sigma.7 haptic device is shipped in a plastic case and two cardboard boxes. Please start by
opening the plastic case which contains the sigma.7 haptic device controller and accessories, as
illustrated in figure 2.
figure 2 – transportation case which contains the sigma.7 device controller and accessories
Among the accessories included in the plastic case are nine screws and an orange hex key that
are required to assemble the device stand contained in the two cardboard boxes. The haptic de-
vice controller is mounted at the end of the setup procedure and is therefore best kept in its pro-
tective case until then.
The operations described in the following steps are best performed by a team of two people.
USB flash drive
power cable
9 screws
for device stand
removable
upper foam level
orange hex key
red hex key
USB cable
user manual
haptic device
controller

9
The sigma.7 support stand is composed of three legs and one mast which are illustrated in figures
3 and 4. These parts can be found in the two cardboard boxes that come with the unit.
figure 3 –stand pole (1x)
figure 4 – stand leg (3x)
The three legs are mounted to the pole by securely fastening the nine stand screws (three screws
per leg) using the orange hex key, as shown in figure 5. The screws and orange hex key can be
found in the plastic case that contains the haptic device controller.
figure 5 – mounting of the device stand legs onto the pole
orange hex key
stand legs
stand screws
stand pole

10
Once the device stand is mounted, the upper foam level with the accessories may be lifted out of
the box, thereby revealing the sigma.7 haptic device controller, as shown in figure 6.
figure 6 – transportation case containing the sigma.7 device after removal of the upper foam part
Remove the pole interface and power supply before lifting out the device from its lower foam block
as illustrated in figure 7. While a first person may hold the device, a second person may remove
the lower foam block and place it on a tabletop or any other stable flat surface. The device can
then be installed back on its lower foam block, in its initial configuration, as shown in figure 8.
figure 7 – the device is lifted out of the plastic container
pole interface
power supply
haptic device
controller
removable
lower foam level

11
figure 8 – the sigma.7 haptic device placed back on its lower foam block and outside of its
plastic transportation case
Insert the pole interface at the rear of haptic device controller by making sure that the groves of
the pole interface align with the spherical contact points on the device.
figure 9 – alignment of the pole interface with the contact points of the sigma.7 haptic device
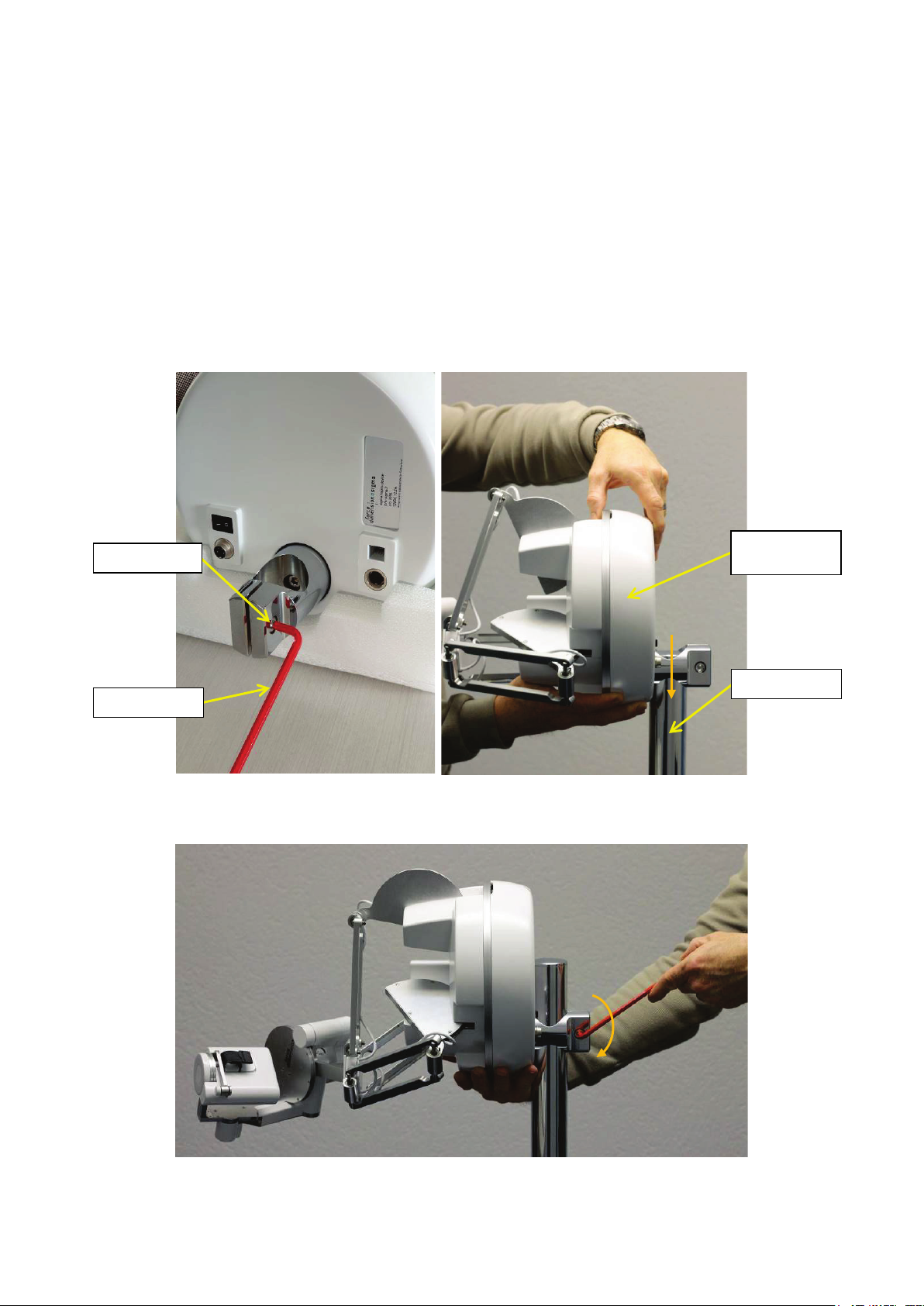
Securely fasten the tightening screw by using the red hex key, as illustrated in figure 10.
figure 10 – mounting of the pole interface to the haptic device controller with the
help of the tightening screw
lower foam
block
tabletop
pole interface
contact points
alignment
grooves
tightening
screw
clamping
screw
red hex key
12
By using the same red hex key, you may now loosen the clamping screw, as illustrated on the left
image of figure 11.
Finally, mount the sigma.7 device base on its stand pole by sliding it from the top, as shown on
the right image of figure 11. Place the haptic device controller at the desired height and lock the
mechanism by fastening the clamping screw.
Verify that the device is correctly secured by making sure that the device base cannot rotate
around its vertical stand pole. If any slippage occurs, further tightening of the clamping screw may
be required.
figure 11 – after loosening the clamping screw, the haptic device controller is mounted on the stand pole
figure 12 – fastening of the clamping screw while holding the device with the opposite hand
clamping screw
red hex key
stand pole
haptic device
controller
13
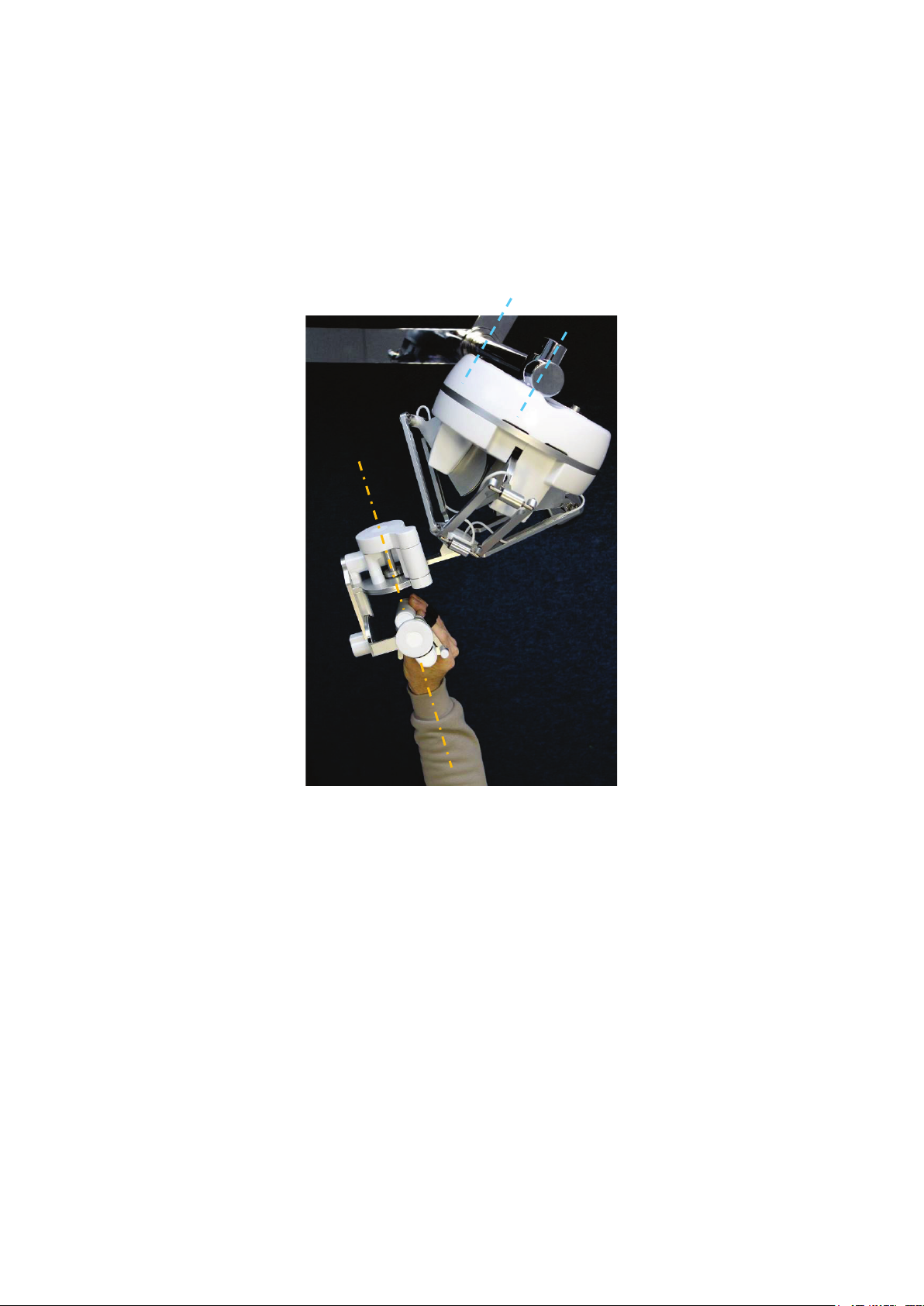
Your sigma.7 haptic device is now fully assembled. You may place the haptic device at your con-
sole desk where you will be operating the system. Please note that optimal wrist dexterity is
achieved when the forearm of the operator is aligned with the first rotational degree of freedom
of the wrist mechanism, as shown in figure 13 (yellow dashed lines). This optimal configuration
can be obtained by correctly positioning and orientating the device with respect to the operator.
For optimal stability, the rear stand leg (see figure 1) should be aligned with the pole attachment
interface protruding from the rear of haptic device controller, as shown in figure 13 (blue dashed
lines).
figure 13 – relative forearm alignment for optimal wrist dexterity (orange dashed lines) and rear leg orien-
tation of stand (blue dashed lines)
14
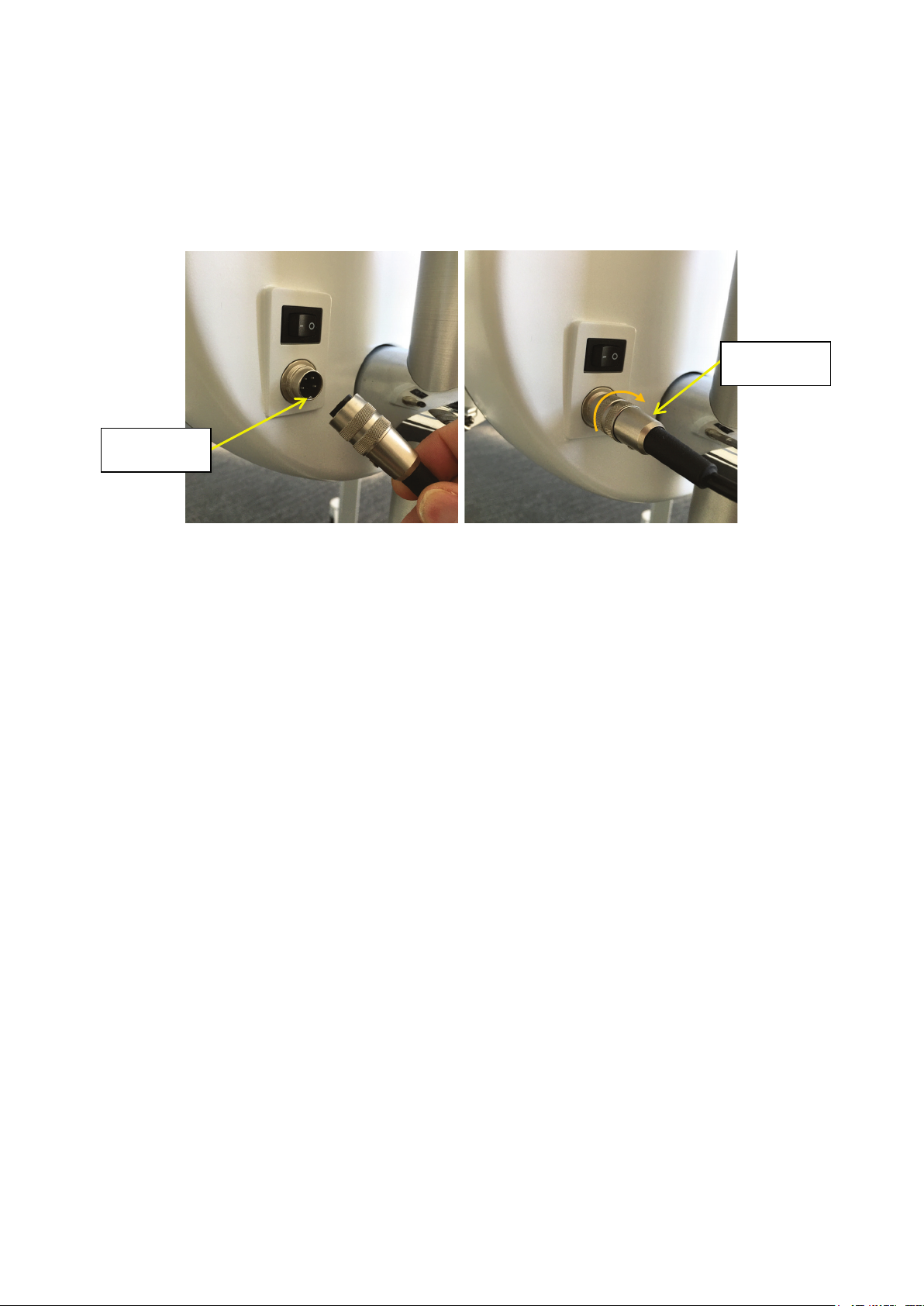
3.2 installing the power supply
Plug and tighten the power supply into the power connector. For safety purposes you should only
operate your sigma.7 haptic device using the original Force Dimension power supply that came
with your haptic device controller. Replacement power supplies can be ordered directly from Force
Dimension.
figure 14 – connection and tightening of the power connector
3.3 connecting the sigma.7 haptic device to your computer
Connect the sigma.7 haptic device to your computer using the USB cable that is included in the
upper foam of the plastic transportation case of the haptic device controller.
3.4 software installation
The upper foam level of the haptic device case also contains a USB flash drive which includes the
drivers and SDK installation media for the different operating systems.
power
connector
alignment
groove

15
configuring the sigma.7 under Windows
4.1 installing the software
The USB driver must be first installed onto your system prior to connecting the sigma.7 to the
computer. To do this, perform the following steps:
1. plug the Force Dimension USB flash drive into your Windows computer
2. open the \Windows folder on the USB flash drive and select the appropriate \32-bit or \64-
bit subfolder according to the operating system version on your computer
3. run the installation program and follow its instructions
4.2 installation description
The installation program creates the following subfolders in:
C:\Program Files\Force Dimension\sdk-<version>
\bin subfolder
This directory contains the demonstration executables and the DLL files required to run the
sigma.7 software. The required DLL files are also copied to the Windows system folder during the
installation.
\drivers subfolder
This directory contains the USB drivers required to operate your haptic device.
\examples subfolder
This directory contains the demonstration programs. Example applications described in section
6.4 and come with their full source code.
\doc subfolder
All documentation files and notices are located in that directory.
\manuals subfolder
All hardware user manuals are located in that directory.
\lib,\include subfolders
These directories contain the files required to compile your application with the Force Dimension
SDK. Please refer to the on-line programming manual for more information.
4.3 installing the drivers
USB drivers
The sigma.7 requires the Force Dimension USB driver. These drivers are installed automatically,
and no additional step is required.

16
configuring the sigma.7 under Linux
5.1 installing the software
The Force Dimension development folder must be installed onto your system before the sigma.7
can be used. To do this, perform the following steps:
1. plug the Force Dimension USB flash drive into your Linux computer
2. extract the sdk-<version>.tar.gz archive for your system architecture from the \Linux
subfolder to the desired location (typically your home folder) by running the following com-
mand within the target folder:
tar –zxvf sdk-<version>.tar.gz
3. this will create a sdk-<version> development folder in the target location
5.2 installation description
The development folder contains the following directories:
\bin subfolder
This directory contains the demonstration executables and the binary files required to run the
sigma.7 software.
\examples subfolder
This directory contains the demonstration programs. Example applications described in section
6.4 and come with their full source code.
\doc subfolder
All documentation files and notices are located in this subfolder.
\manuals subfolder
All hardware user manuals are located in that directory.
\lib,\include subfolders
These directories contain the files required to compile your application with the Force Dimension
SDK. Please refer to the on-line programming manual for more information.
5.3 installing the drivers
The Linux version of the Force Dimension SDK requires the development packages for the
libusb-1.0 to be installed on your Linux distribution.
IMPORTANT
PLEASE NOTE THAT USB ACCESS TO THE HAPTIC DEVICE REQUIRES SUPERUSER
PRIVILEDGES ON MOST LINUX DISTRIBUTIONS

17
configuring the sigma.7 under macOS
6.1 installing the software
The Force Dimension development folder must be installed onto your system before the sigma.7
can be used. To do this, perform the following steps:
1. plug the Force Dimension USB flash drive into your Apple computer
2. open the sdk-<version>.dmg file for your version of macOS from the \macOS folder and
extract the sdk-<version> folder to the desired location (typically your home folder)
3. this will create a sdk-<version> development folder in the target location
6.2 installation description
The development folder contains the following directories:
\bin subfolder
This directory contains the demonstration executables and the binary files required to run the
sigma.7 software.
\examples subfolder
This directory contains the demonstration programs. Example applications described in section
6.4 and come with their full source code.
\doc subfolder
All documentation files and notices are located in this subfolder.
\manuals subfolder
All hardware user manuals are located in that directory.
\lib,\include subfolders
These directories contain the files required to compile your application with the Force Dimension
SDK. Please refer to the online programming manual for more information.
6.3 installing the drivers
The macOS version of the Force Dimension SDK uses Apple’s native USB drivers. No further instal-
lation is required.

18
operating the sigma.7
7.1 coordinate system
base translation
The position of the center of the end-effector (handle) is expressed in Cartesian coordinate and in
IUS (metric) unit. Figure 15 illustrates the coordinate system. You will notice that the X-axis of the
coordinate system in parallel to the first revolute axis of the wrist.
The actual origin of the coordinate system (0,0,0) is located on a virtual point situated at the cen-
ter of the physical workspace of the haptic device.
figure 15 – Cartesian coordinate system of the sigma.7 haptic device
X-axis
Y-axis
Z-axis

19
wrist orientation
The orientation of the sigma.7 haptic device is expressed by a reference frame Rwrist which is nu-
merically represented using a 3x3 rotation matrix. This reference frame is expressed in relation to
the world coordinate system described in figure 15.
The reference frame of the wrist is computed from the angle values returned by the joint sensors
mounted of each revolute axis of the wrist as illustrated in figure 16. When all joint angles are
equal to zero, an identity rotation matrix is returned.
figure 16 – reference frame of the wrist of the sigma.7 haptic device
gripper angle
The angular position of the force gripper is returned in either degrees or radian.
A positive angle value is returned for right-hand sigma.7 haptic devices. A negative angle value
is returned for left-hand haptic devices.
Angular values closer to zero correspond to configurations where the force gripper is in a closed
configuration. Opening of the force gripper increases the magnitude of the angle.
wrist axis 0
wrist axis 1
wrist axis 2
wrist reference frame R
wrist

20
7.2 operating modes
calibration
Calibration of the haptic device controller is necessary to obtain accurate, reproducible localiza-
tion of the end-effector within the workspace of the haptic device. The sigma.7 is designed in such
a way that there can be no drift of the calibration over time, so the procedure only needs to be
performed once each time the device is powered ON.
The automatic calibration procedure is performed by software using the Force Dimension SDK, for
example by launching the application "HapticInit" which automatically drives the device through-
out its workspace. Please do not touch the device during this automatic calibration procedure.
After calibration, the device is ready for normal operation.
gravity compensation
To prevent user fatigue and to improve dexterity during manipulation, the sigma.7 features gravity
compensation. When gravity compensation is enabled, the weights of the arms and of the end-
effector are taken into account and a vertical force is dynamically applied to the end-effector in
addition to the desired user force command. Please note that gravity compensation is computed
on the host computer, and therefore only gets updated every time a new force command is sent to
the haptic device by the application. Gravity compensation is enabled by default and can be dis-
abled through the Force Dimension SDK.
forces
By default, and when an application opens a connection to the haptic device controller, all forces
are initially disabled. Forces can be enabled or disabled through the Force Dimension SDK.
brakes
The device features electromagnetic brakes that can be enabled through the Force Dimension
SDK. These brakes are enabled by default every time the forces are disabled. When the brakes are
engaged, a viscous force is created that prevents rapid movement of the end-effector.
Other manuals for sigma.7 haptic device
1
Table of contents
Other Force Dimension Medical Equipment manuals



Popular Medical Equipment manuals by other brands

KaVo
KaVo ORTHOPANTOMOGRAPH OP 3D User and installation manual

Huger
Huger PM 138 H user manual

Mindray
Mindray Accutorr 7 Operator's manual

schwa-medico
schwa-medico MedicoBack P-type Series instruction manual

Cantel Medical
Cantel Medical Crosstex Twist Plus Instructions for use

Invacare
Invacare IRC5PO2 Operator's manual

Koya
Koya Dayspring Directions for use

dynarex
dynarex D500 user manual

Atos Medical
Atos Medical PROVOX Vega Instructions for use

Augmented Vision Labs
Augmented Vision Labs S5 Inserter user manual

Dentsply Sirona
Dentsply Sirona Orthophos E Installation requirements

Medela
Medela Invia Motion NPWT Patient Instructions For Use





