v09/2020
1. DESCRIPTION
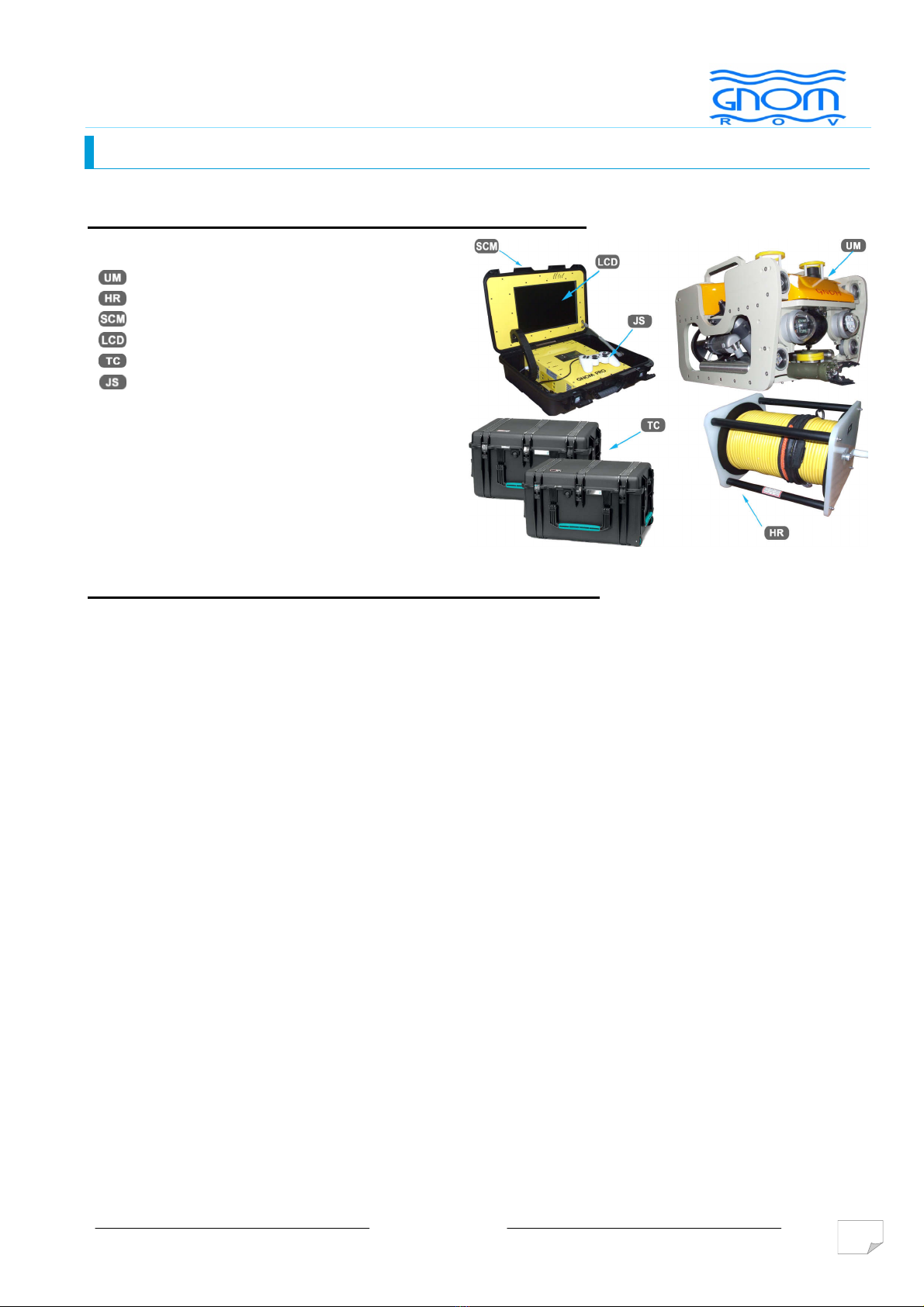
The vehicle is connected with the surface unit via thin cable transmitting power voltage, operation
instructions, data, and video signal from the vehicle.
The cable with diameter 6mm is strengthened by Kevlar threads (breaking effort is 200kg) and by
additional polyethylene shield. The maximum cable length is up to 400m. To counerbalance the weight
of the vehicle and give it a neutral buoyancy, the foam polystyrene float is installed in the front part of
the vehicle. Similar floats can be put on the cable to change the neutral buoyancy to a little positive.
Maximal operating depth of the vehicle is 150m.
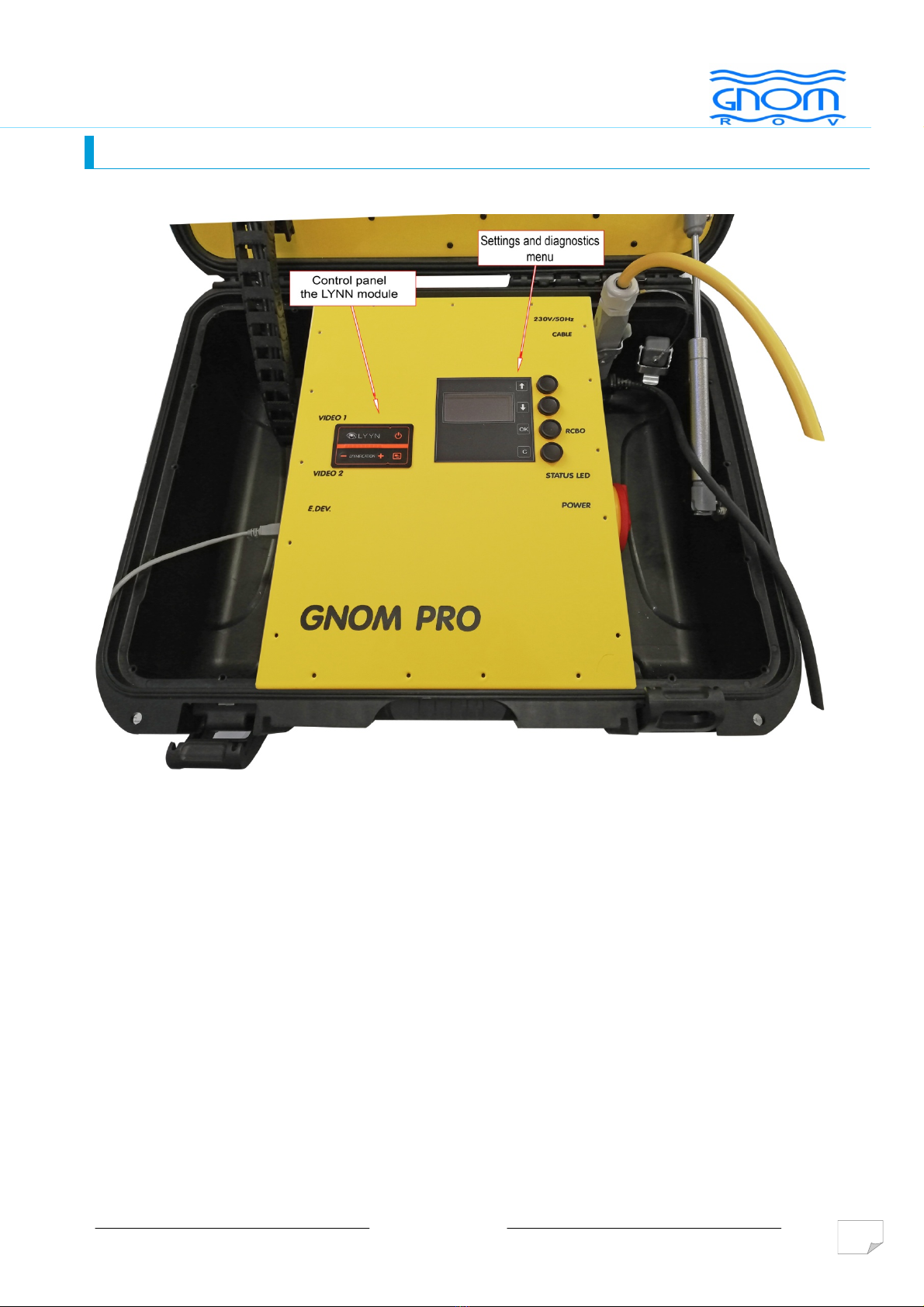
Using the control pads and joystick, the operator can move GNOM forward and backward, turn to the
right and left, up and down; adjust the thruster speed and the brightness of the lights. All data is
displayed on the monitor in the "TV-text" mode. By pressing one of the buttons on the joystick, the
operator can enter the menu to tune up some of the functions – calibrate the depth sensor and the
compass, as well as some other functions.
1.2
TECHNICAL SPECIFICATION
Speed:
horizontal motion, up to 1,5 m/s
vertical motion, up to 0.5 m/s
lateral motion, up to 0.5 m/s
(above numbers depend on a length of the cable)
Max operating depth 150 m
Power voltage 100-230VAC 2000 Watts
Operating temperature range from -5 to +45°C
Operating environment humidity up to 100%
Weight of the vehicle 25 kg
Full weight of the system 100 kg
Dimensions of vehicle (WxLxH) 440х650х360 mm
Tether:
diameter 11 mm
length up to 400 m