© Gooligum Electronics 2015 www.gooligum.com.au
Baseline and mid-range PIC training and dev board operation guide Page 6
side) via JP21. That is, to use the 32.768 kHz crystal with the PIC’s internal oscillator, you must connect
it through both JP20 and JP21.
The same is true for the 4.00 MHz ceramic resonator. To use it with the PIC’s internal oscillator, connect
one side of the resonator to OSC1 via JP20 and the other side to OSC2 via JP21.
A 10 kΩ resistor and 82 nF capacitor are also provided, and can be connected via JP20 to OSC1, to form
an external RC oscillator with a frequency of around 1 kHz.
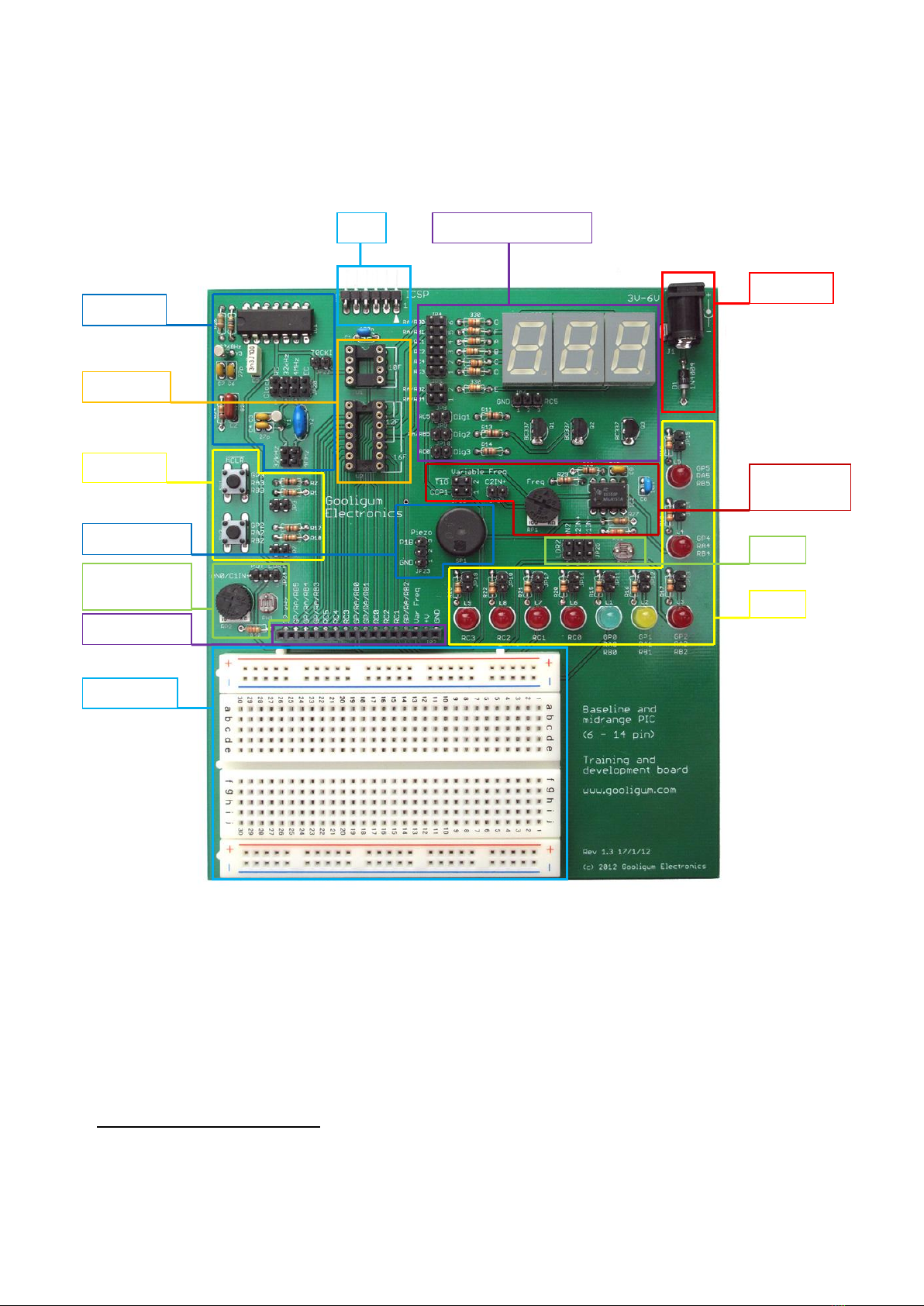
The 7-segment LED displays consist of three common-cathode digits, with the anodes of segments A-D,
F and G connected via 330 Ω resistors and jumper block JP4 to pins RA/RB0-1 and RC1-4. Segment E
can be connected via JP5 to either RA/RB2 or RA/RB4.
The common cathode of digit 1 (the digit on the left) can be connected either to ground or a transistor
controlled by RC5, using jumper JP6.
The cathodes of digits 2 and 3 are connected to transistors controlled by RA/RB5 and RC0 respectively.
The base of each of these NPN transistors is connected to its associated PIC pin through a 1 kΩ resistor
and a jumper: JP8 for digit 1, JP9 for digit 2, and JP10 for digit 3. When the PIC pin pulls the base high,
the transistor conducts, shorting the common cathode of the attached digit to ground.
So, to use just a single digit:
Connect segments A-D, F and G to their associated PIC pins, by placing a shunt across every
position in jumper block JP4. That is, you use six shunts at once, in JP4.
Connect segment E to either RA/RB2 or RA/RB4, by placing a shunt in one of the two positions
in jumper block JP5, selecting the PIC pin to be used for segment E.
Connect the common cathode of digit 1 to ground, by placing a shunt across pins 1 and 2 of
jumper JP6.
Leave jumpers JP8, JP9 and JP10 open, so that the transistors will not conduct.
To use multiple digits:
Connect segments A-G to PIC pins using jumper blocks JP4 and JP5, as above.
If you want to use digit 1, connect its common cathode to the transistor controlled by RC5, by
placing a shunt across pins 2 and 3 of JP6.
Connect the transistors controlling whichever digits you wish to use to their associated PIC pins,
using jumpers JP8, JP9 and JP10
For a two-digit display, you would normally use digits 1 and 2, by connecting pins 2 and 3 of JP6, closing
JP8 and JP9, and leaving JP10 open. The two digits would be activated by RC5 and RA/RB5.
But you could instead choose to use digits 2 and 3, by closing JP9 and JP10, and leaving JP6 and JP8
open. The two digits would then be activated by RA/RB5 and RC0.
For a three-digit display, connect pins 2 and 3 of JP6, and close JP8, JP9 and JP10. The three digits are
activated by RC5, RA/RB5 and RC0.
Note that, if you are using multiple digits, you should ensure that only one transistor (and hence digit) is
activated at once.
The variable frequency oscillator, based on a 555 timer, provides a signal with a frequency that can be
varied from approximately 150 Hz to 10 kHz, using trimpot RP1.
The digital form of this signal can be connected to either the Timer 1 gate input, T1G , or the capture
input pin, CCP1, using jumper block JP26.