Drive User Guide
2
Contexts
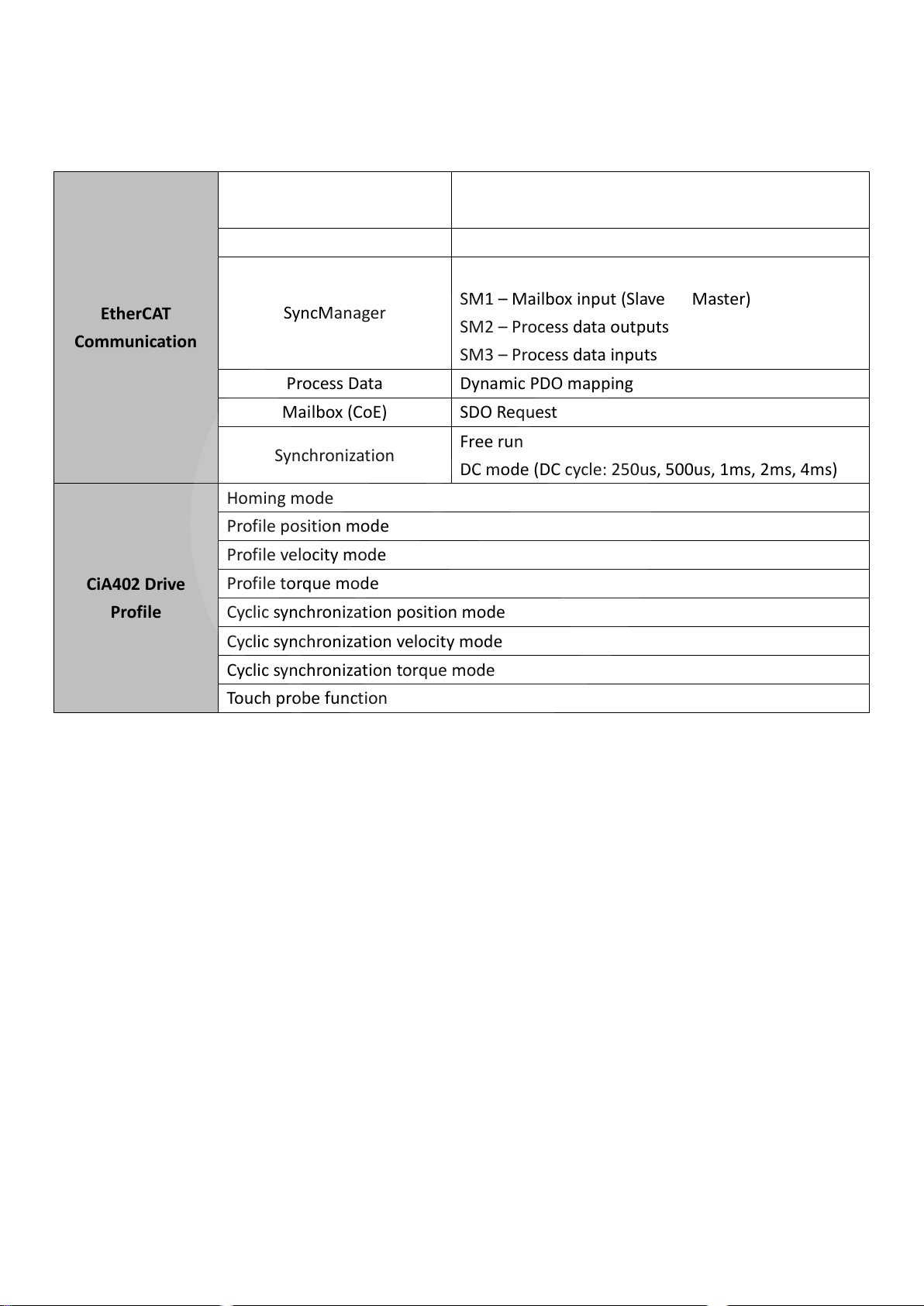
1. Communication Specification of EtherCAT ............................................................................................4
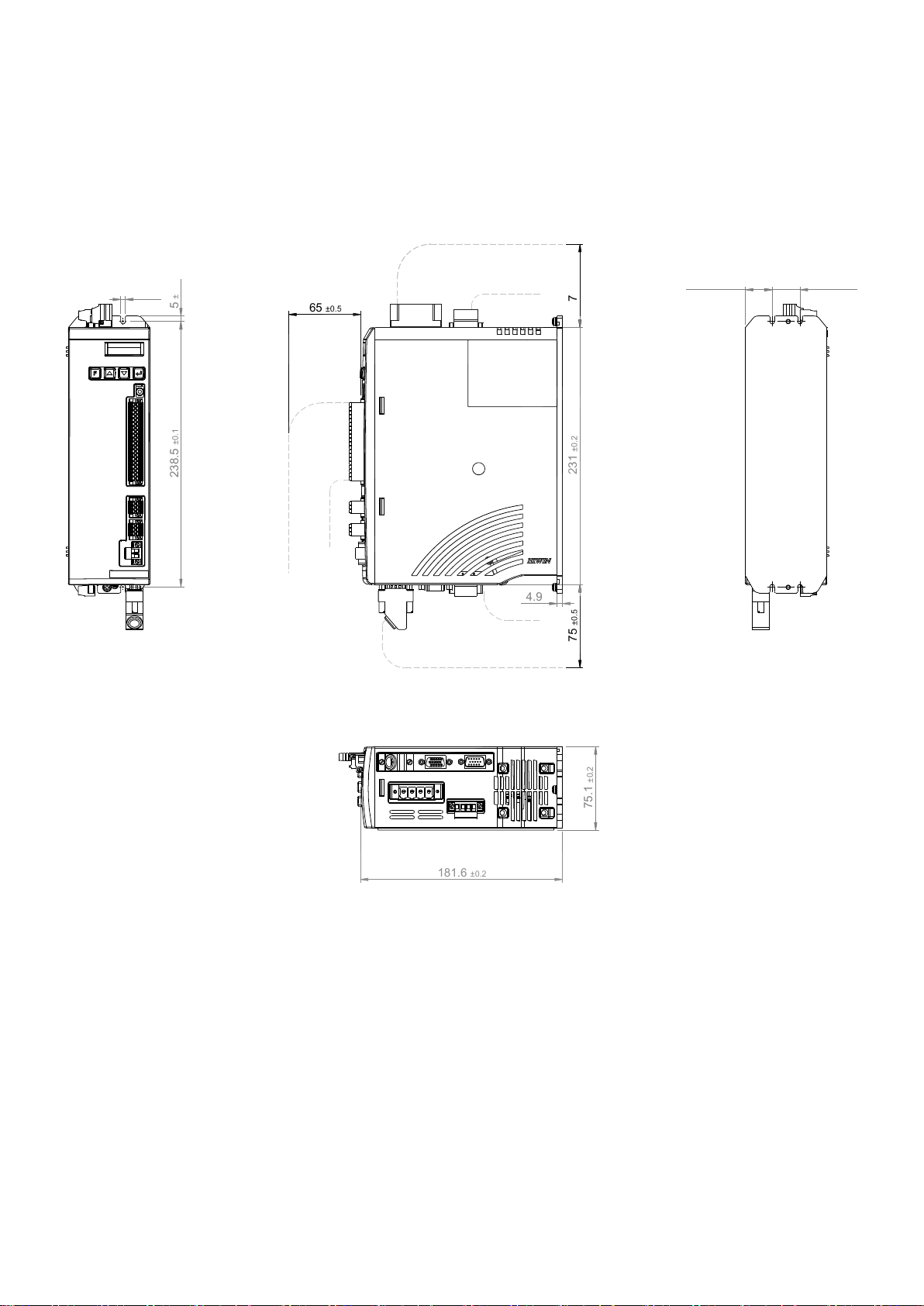
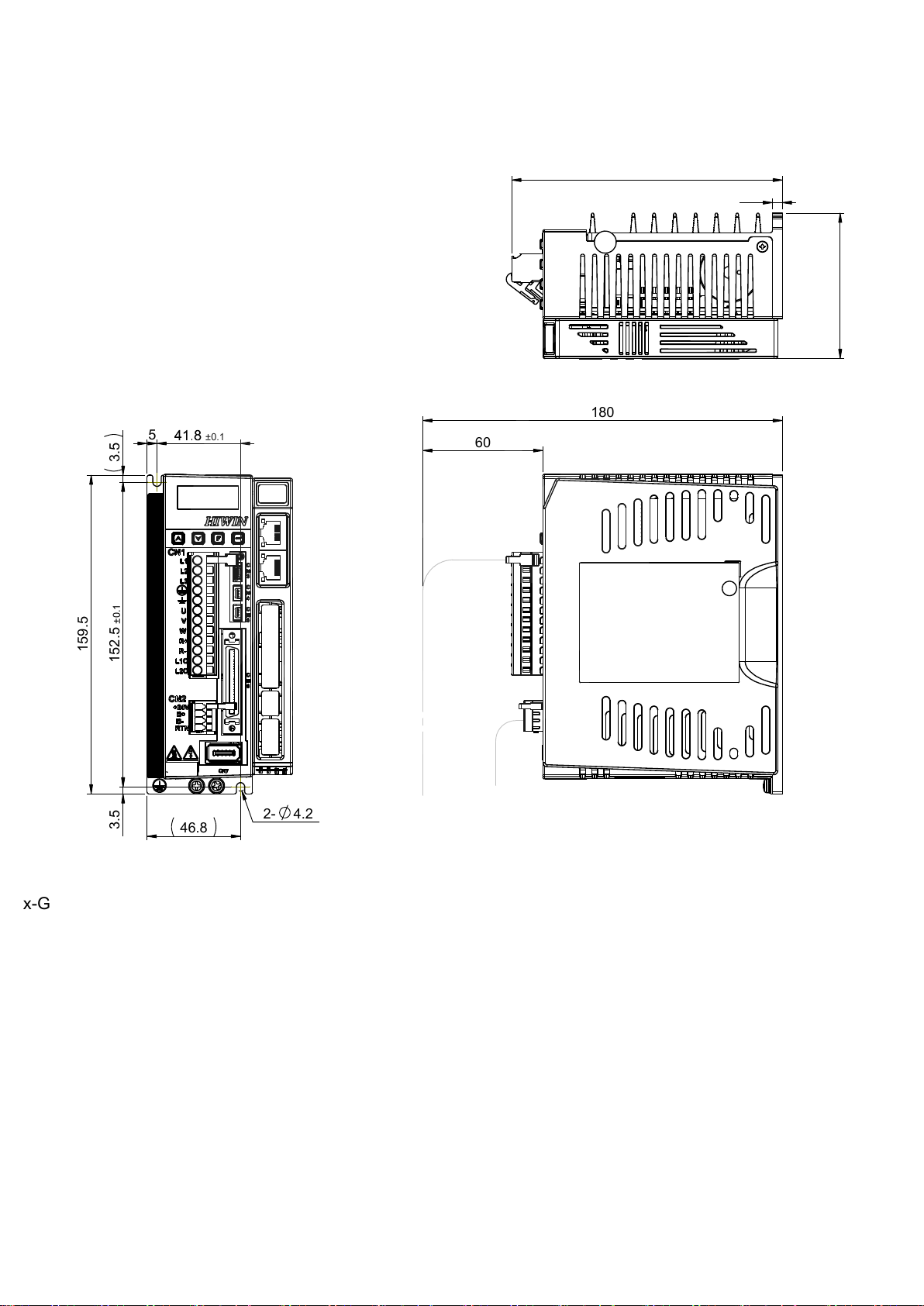
2. Physical Dimensions...............................................................................................................................5
3. Object Dictionary Table..........................................................................................................................8
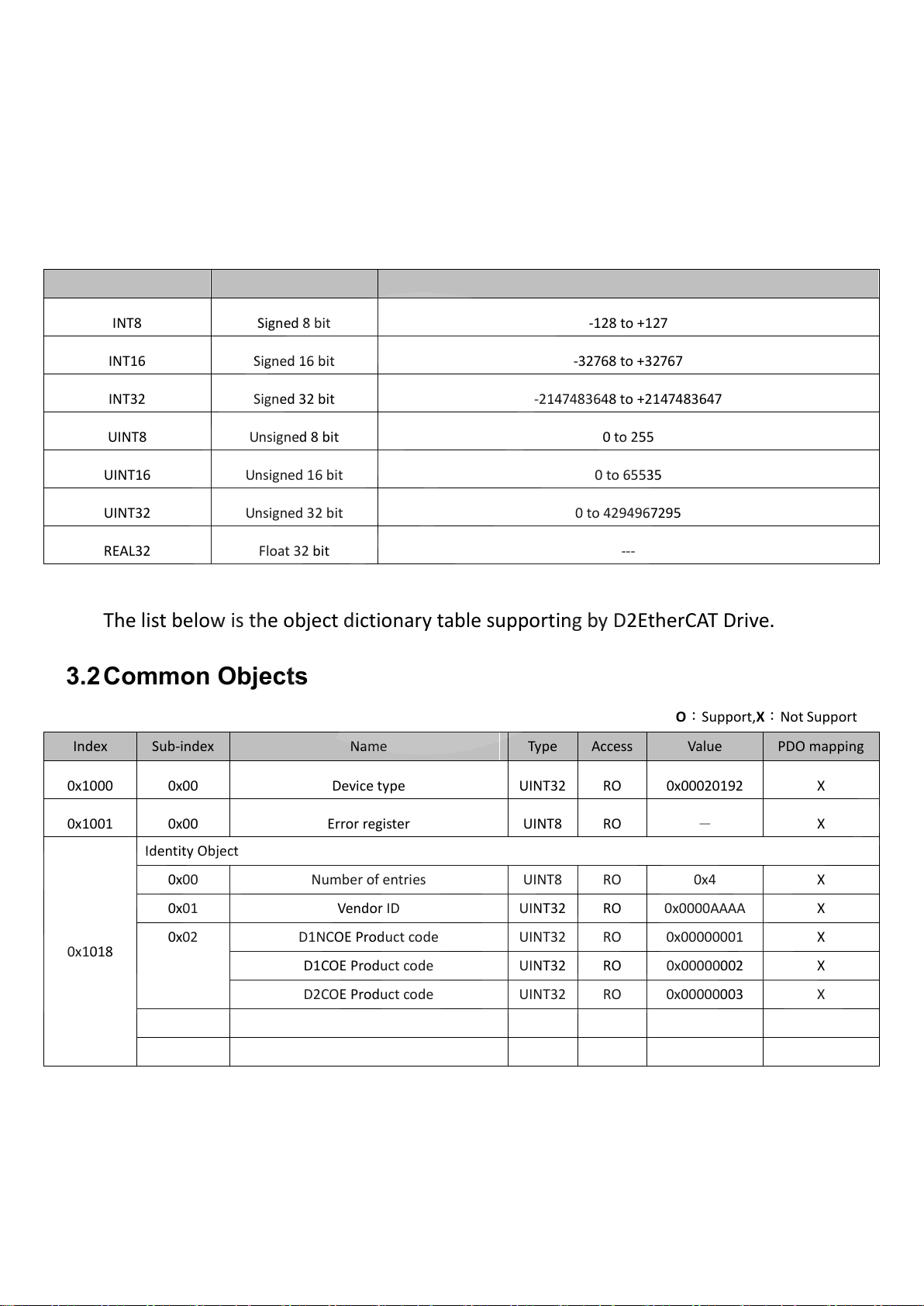
3.1 Data Type ...................................................................................................................................8
3.2 Common Objects .......................................................................................................................8
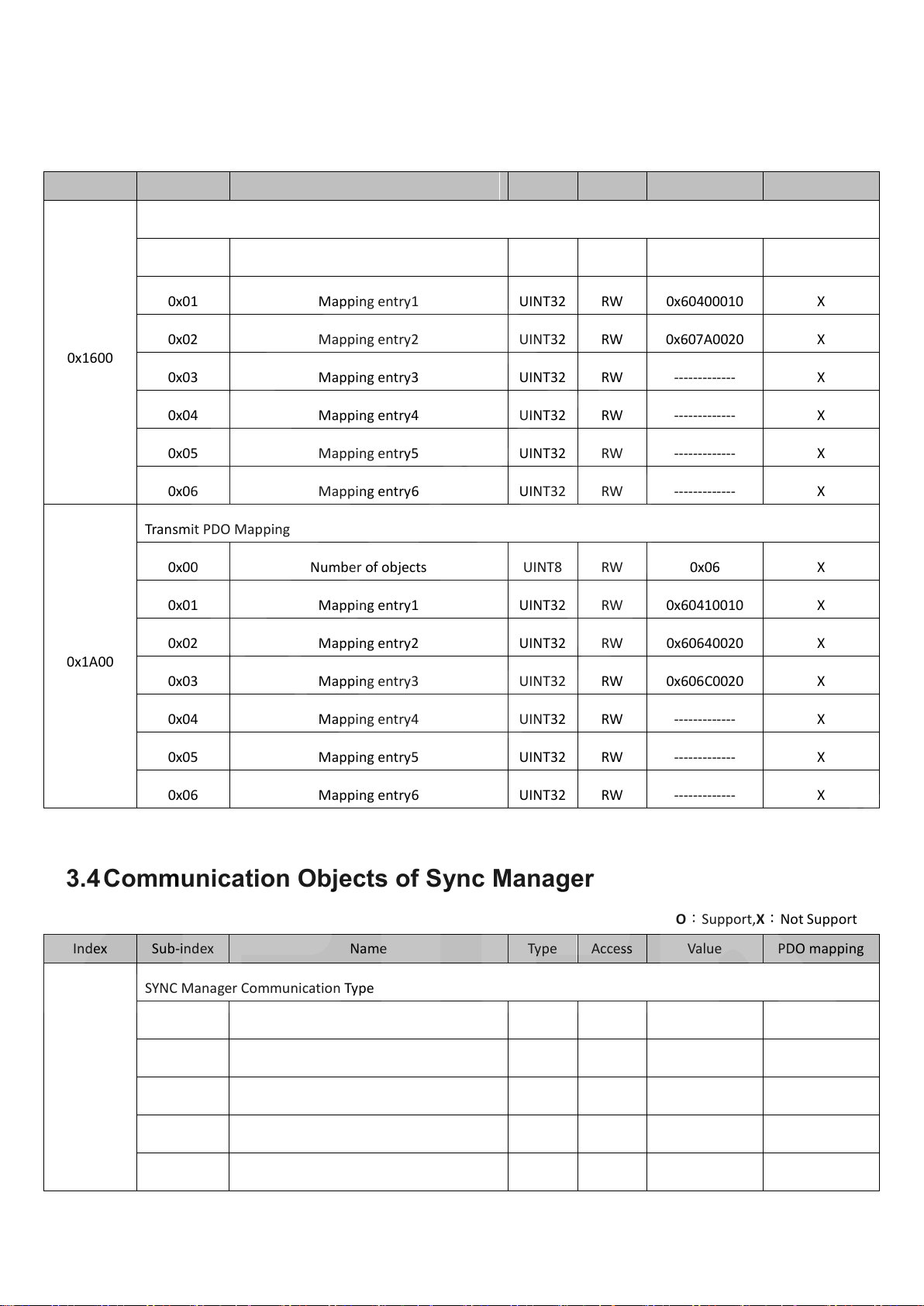
3.3 PDO Mapping Objects................................................................................................................9
3.4 Communication Objects of Sync Manager ................................................................................9
3.5 CiA 402 Objects of Guide Regulations .....................................................................................10
3.6 Manufacturer Defined Objects ................................................................................................12
3.7 Objects description of the Manufacture Defined Objects.......................................................12
4. Communication Architecture of EtherCAT Drive .................................................................................15
5. State Machine of EtherCAT ..................................................................................................................17
6. State Machine of CiA402 .....................................................................................................................19
7. PDO Mapping.......................................................................................................................................21
8. Synchronization Mode.........................................................................................................................23
9. Drive’s Mode of Operation ..................................................................................................................24
9.1 Position Control Mode.............................................................................................................24
9.1.1 Profile Position Mode (PP)...........................................................................................24
9.1.2 Cyclic Synchronization Position Mode .........................................................................28
9.2 Velocity Control Mode .............................................................................................................30
9.3 Torque Control Mode...............................................................................................................32
9.4 Homing Mode ..........................................................................................................................33
10. Touch Probe Function ..................................................................................................................41
A. How to use TwinCAT making connection with drive ...........................................................................43
B. How to use TwinCAT operating drive in position mode ......................................................................46
C. How to use TwinCAT to process dynamic PDO Mapping.....................................................................52
D. How to setup the Operational Mode for EtherCAT .............................................................................53
www.servosystem.ru +7(495) 407-01-02