Hylio Agrodrone (AG-110) Operations Manual
©2020 Hylio Inc. All Rights Reserved 8
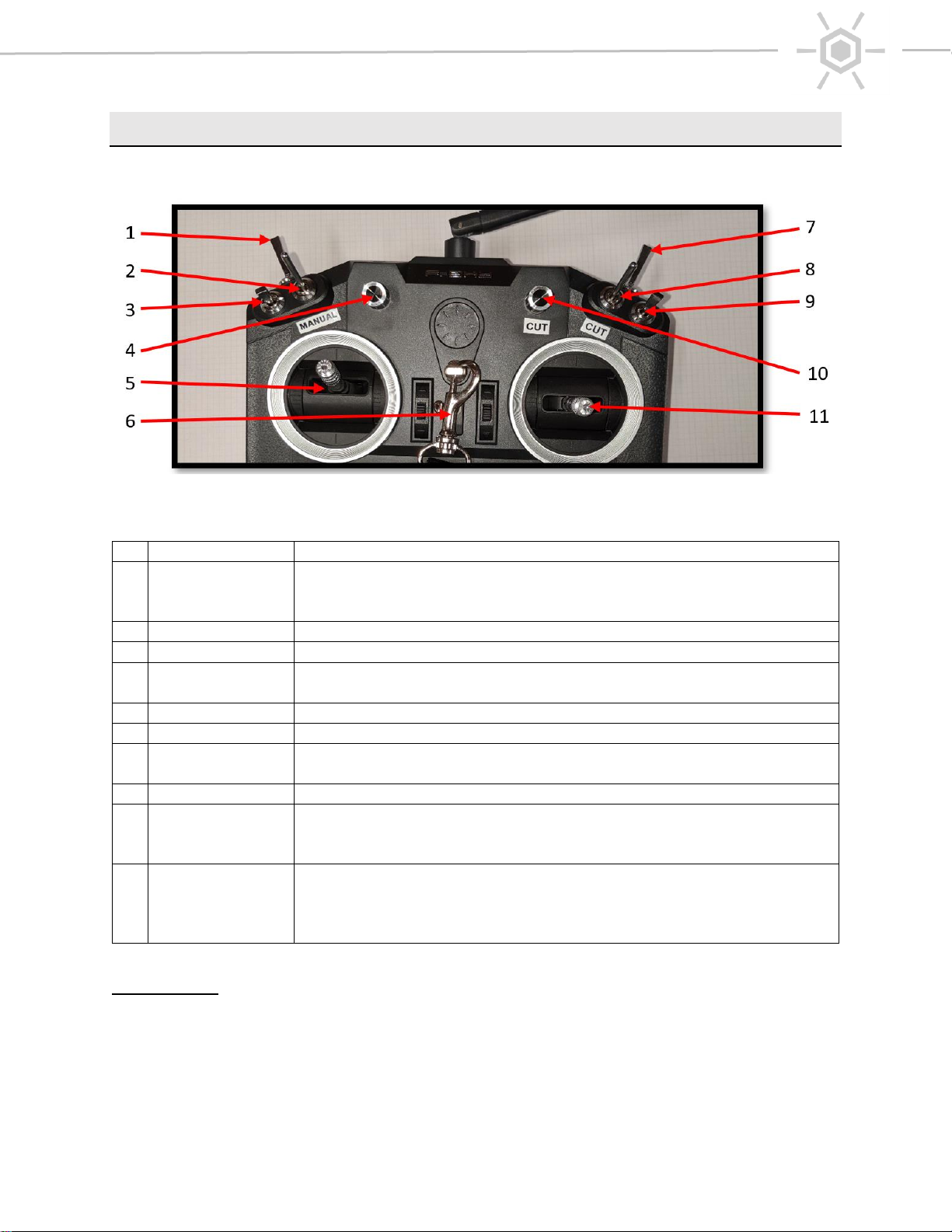
RC control - All missions occur with pre-programmed commands providing instructions to the
UAS. At all times the PIC has an RC remote located near the ground control station, with the
ability to override the current mission. The AG-110 offers an optional safety feature where in the
case that the RC connection is lost, the autopilot software will immediately end the mission and
return the UAS home launch location. In this case, the UAS ascends to an altitude set by the
PIC in advance of the mission and determined to be safe given the surrounding terrain. The
UAS then returns in a straight line to the launch location.
Emergency Kill Switch - An emergency "Kill Switch" allows the operator to instantly stop
motors in the event of an emergency. This kill switch is available through both the ground
control computer telemetry link and the RC.
Full Black Box Recording of All Flights - Flight data shows time stamped information of all
operator control input, GPS statuses and outputs, vibrations, battery voltage, accessory
voltages, IMU outputs, compass readings and all other sensor and flight information. All flight
information is automatically saved internally on the UAS. Any operator or system caused issues
can be easily identified with this information. Hylio’s ground control software offers analysis of
this log information to help predict potential future problems. As a supplement to routine
maintenance, these logs are analyzed daily to help protect the user from unforeseen issues.
This process can be completed locally on AgroSol without the need for internet access. If an
operator feels there may be an issue, logs from the last flight can be analyzed using AgroSol in
minutes without leaving the field.
Obstacle Detection and Avoidance - The AG-110 uses two radars facing forward and back to
detect obstacles around the drone. In the event that an obstacle is detected, the UA will
immediately pause the mission and wait for command. To ensure operational safety, this feature
is optional and can be turned on/off in AgroSol.
Safety parameters - Max altitude, distance from home, horizontal speed and vertical speed
defaults are set by Hylio Inc., and the customer can set these as well based on location and
operating restrictions. The AG-110 uses multiple sensor types to ensure maximum altitude is
respected in the event of primary altimeter sensor failure.
Aviation Lighting - All AG-110 come with mounted navigation lights in a standard configuration
to indicate orientation and health. Hylio offers optional Long-range visible, high intensity LED
strobes. Back 2 are white. Front right is green. Front left is red.
Intelligent Assisted Launch and Landing - Aircraft uses GPS and IMU data to determine
when the craft is fully on the ground, meaning the craft will not shut rotors off until firmly on the
ground. Aircraft also uses IMU data to safely and smoothly handle “In Ground Effect” caused by
the rotor downwash, which lessens stress and accident likelihood for operator.
Flight Stall Prevention - The flight controller prevents accidental 'throttle zero' motor stall while
in the air. In an emergency, the operator can switch instantly to 'manual' mode to activate rotor
kill, providing complete system override by the pilot during an in-flight emergency. This override
is also available through the ground control station computer over the telemetry link.
5-second auto-lock rotors - Automatically locks rotor from accidental turning after initial power
connected and again five seconds after rotors stop.
Change of Flight Parameters - Ability to change certain parameters in real-time (during flight).