Brushless Motor Driver SEH400RB
Catalogue
1 Brief Instruction ...........................................................................................................................................2
1.1 Features ................................................................................................................................................2
2.1 Electrical Performance .........................................................................................................................2
4 Driver port and function description ...............................................................................................................3
4.1 Driver port ............................................................................................................................................3
4.2 Terminal Description ........................................................................................................................... 4
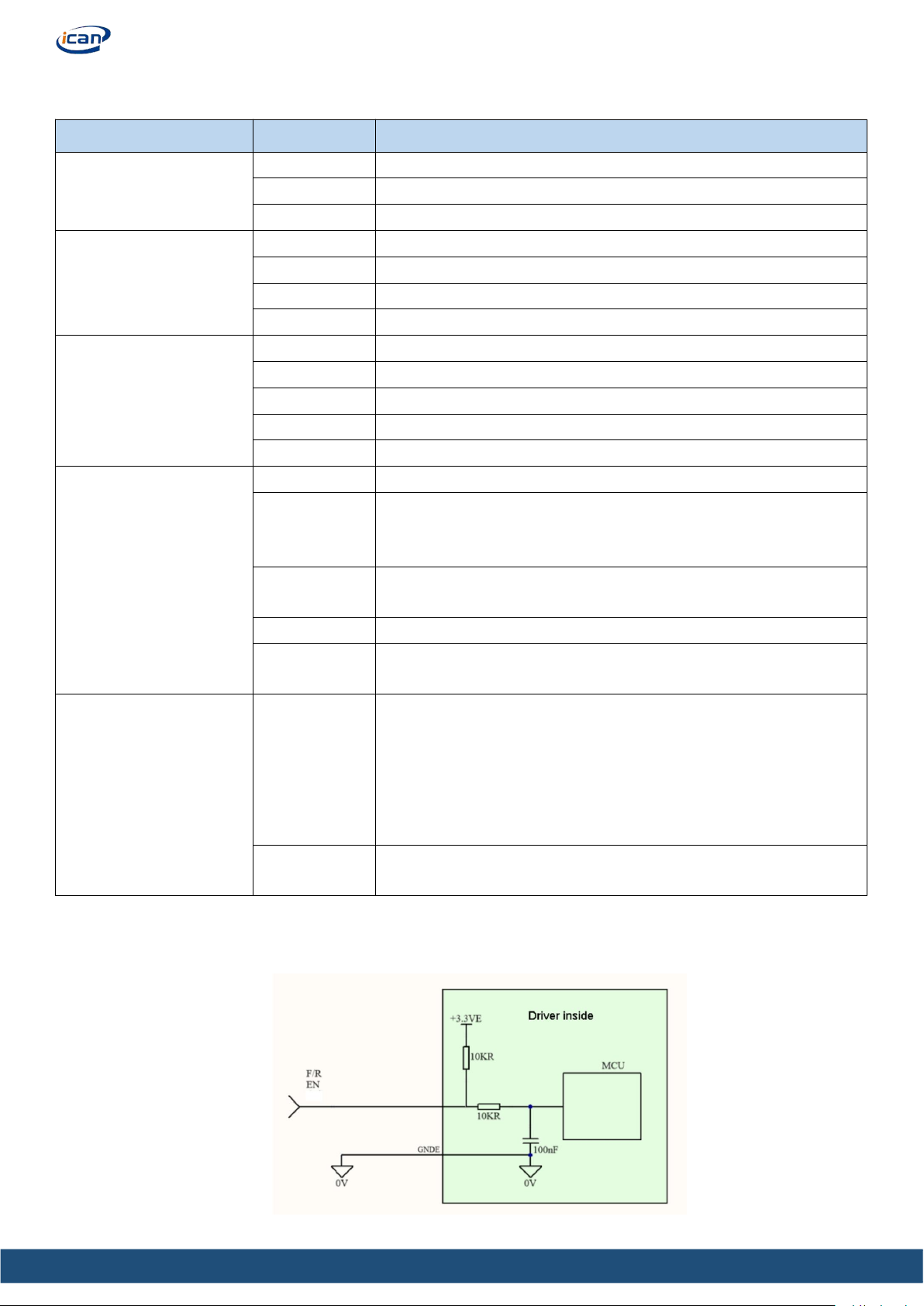
4.3 Description of external control signal circuit ...................................................................................... 4
4.4 Output circuit description .................................................................................................................... 5
5 Introduction to panel functions ....................................................................................................................... 6
5.1Panel functions ......................................................................................................................................6
5.2 Panel introduction ................................................................................................................................ 7
6.1 Start and stop ....................................................................................................................................... 9
6.2 Direction control. ................................................................................................................................. 9
6.3 Speed regulation mode. ........................................................................................................................9
6.4 RS485 .................................................................................................................................................11
7.2ALARM RESET .................................................................................................................................15
8 Troubleshooting ............................................................................................................................................ 15
After Sales Service ...........................................................................................................................................16