3
CONTENTS
Chapter 1 PREFACE .........................................................................................................................................5
1.1 Purpose..........................................................................................................................................5
1.2 Product Introduction .....................................................................................................................5
Chapter 2 Preparation ........................................................................................................................................6
2.1 On BLE UNO R3 Master Control Board and Extension Board..........................................................6
2.1.1 BLE UNO R3 Master Control Board.....................................................................................6
2.1.2 MotorDriverBoard Expansion board interface diagram ...........................................................7
2.2 Development environment Arduino IDE.............................................................................................8
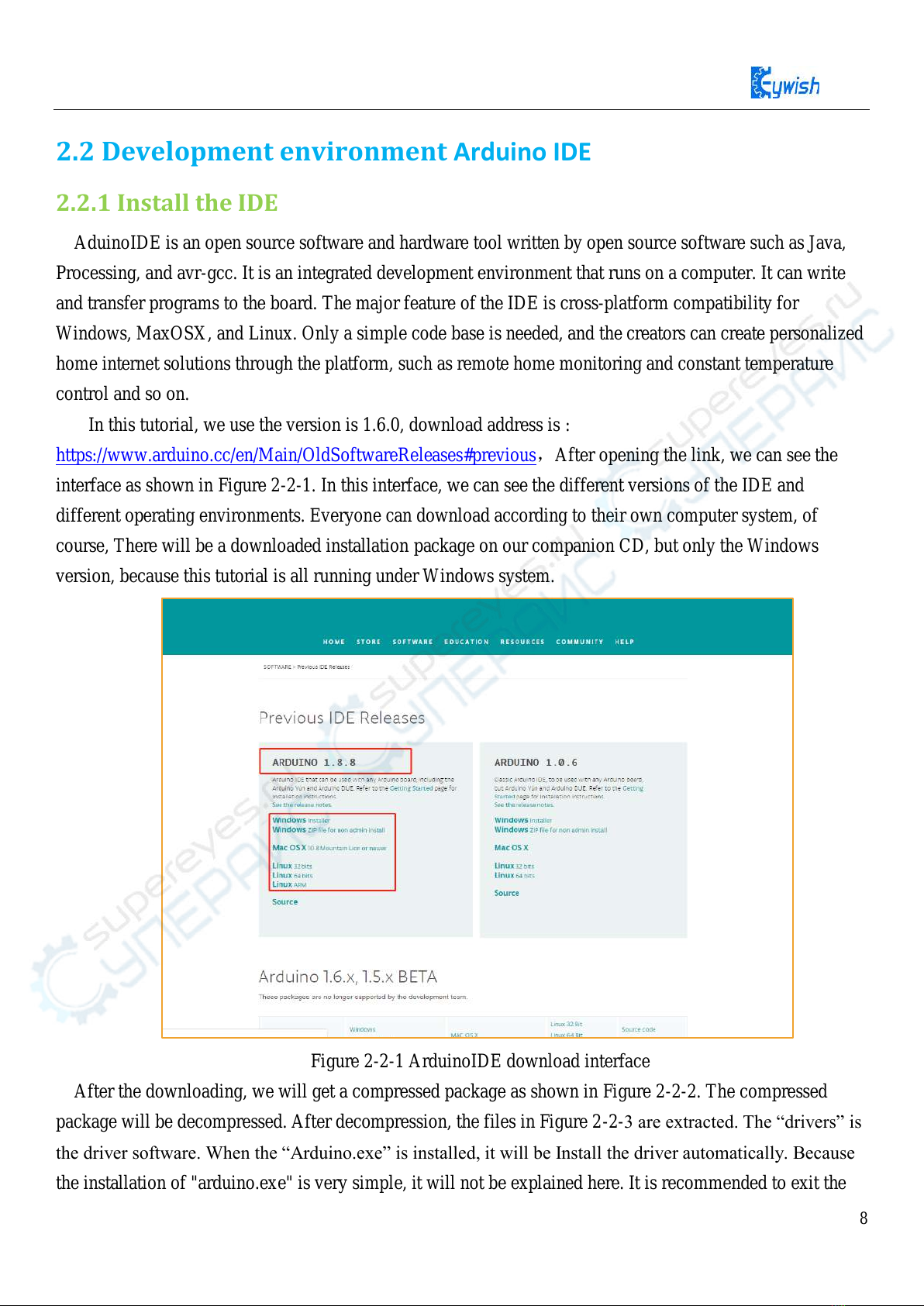
2.2.1 Install the IDE...........................................................................................................................8
2.2.2 Install Driver...........................................................................................................................10
2.2.3 IDE Interface Introduction......................................................................................................14
Chapter 3 Installation.......................................................................................................................................17
3.1 Tank Assembly ..................................................................................................................................17
3.1.1 Lower metal backplane copper column and battery installation ............................................17
3.1.2 load-bearing wheels、pedrail and motor installation.............................................................19
3.1.3 Servo and UNO board installation..........................................................................................24
3.1.4 Upper acrylic floor mounting..................................................................................................29
Chapter 4 Experiment......................................................................................................................................31
4.1 Servo ..................................................................................................................................................31
4.1.1 Servo Introduction ..................................................................................................................31
4.1.2 Working principle...................................................................................................................32
4.1.3 steering test test.......................................................................................................................33
4.2 RGB WS2812B Experiment..............................................................................................................34
4.2.1 RGB WS2812B Description...................................................................................................34
4.2.2 RGB WS281B working principle...........................................................................................34
4.2.3 WS281B drive principle .........................................................................................................35
4.2.4 RGB WS281B Test Program..................................................................................................36
4.3 Passive Buzzer ...................................................................................................................................36
3.2.2.1 Description...........................................................................................................................36
4.3.2 Buzzer working principle........................................................................................................37
4.3.3 Alarm Test ..............................................................................................................................37
4.4 Motor test procedure..........................................................................................................................43
4.4.1 Motor control principle...........................................................................................................43