Piezoelectric Force Sensors, Ring Force Transducers
9001C_002-928e-12.20Page 2 Page 39001C_002-928e-12.20
Content
1. Introduction .................................................................................................................................4
2. Important instructions................................................................................................................5
2.1 For your safety....................................................................................................................5
2.2 Disposal instructions for electrical and electronic equipment .............................................6
2.3 Unpacking...........................................................................................................................6
2.4 Notes on handling the sensor.............................................................................................6
2.5 Tips on use of manual ........................................................................................................7
3. General.........................................................................................................................................8
3.1 Applications ........................................................................................................................8
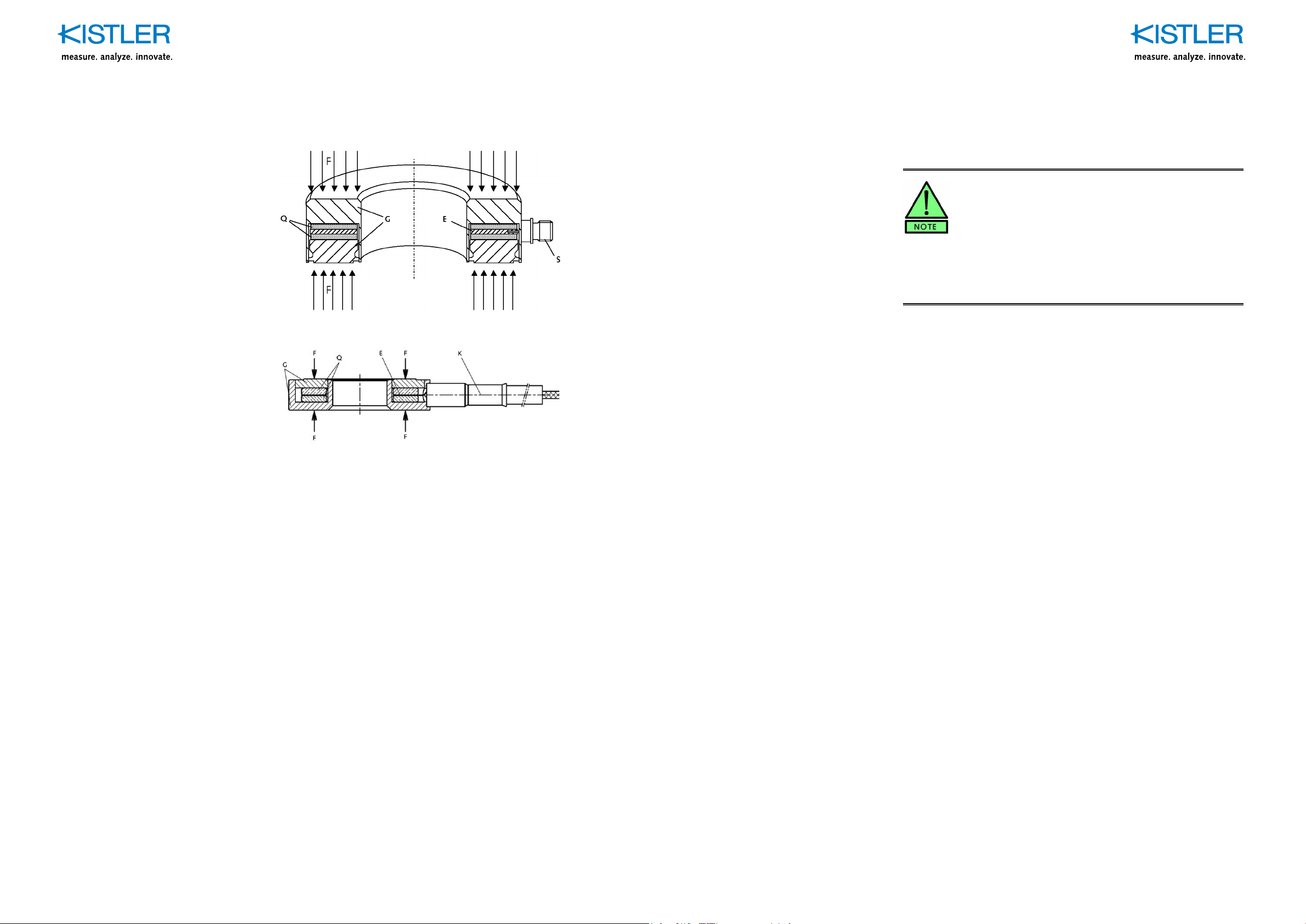
3.2 Sensor design and principle of operation ...........................................................................9
4. Mounting....................................................................................................................................11
4.1 General aspects of mounting ...........................................................................................11
4.1.1 Pretension and preload .......................................................................................11
4.1.2 Sensor in direct path of force ..............................................................................13
4.1.3 Sensor in force shunt .........................................................................................13
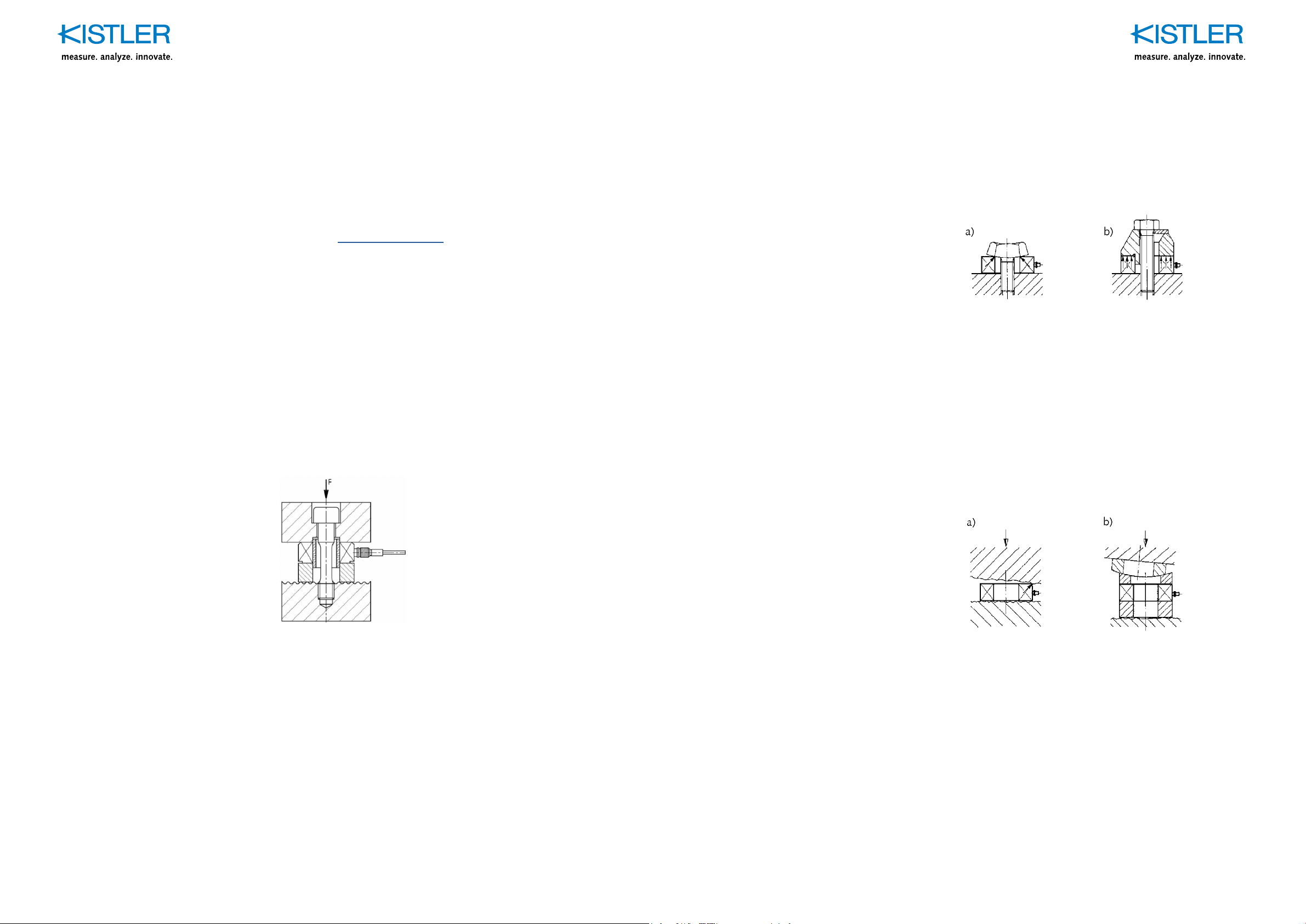
4.2 Structural design and force contact ..................................................................................14
4.2.1 Examples.............................................................................................................14
4.3 Effect of elasticity conditions on the measurements.........................................................17
4.3.1 Calculations related to engagement of force.......................................................18
4.3.2 Examples.............................................................................................................21
4.4 Mounting example ............................................................................................................24
4.5 Installation of sensor family 90x1C and 910xC ................................................................25
4.5.1 Type 9422A: mounting for compression forces only ...........................................25
4.5.2 Type 9420A: Mounting for both compression and tensile forces.........................27
4.6 Installation of big force sensors Type 9081C and 9091C .................................................29
4.7 Installation of a Slimline Sensor Types 9130C … 9137C .................................................30
4.7.1 Direct force path mounting ..................................................................................30
4.7.2 Type 9410A: mounting in force shunt mode........................................................31
5. Measurement.............................................................................................................................33
5.1 Basic arrangement of a measuring system ......................................................................33
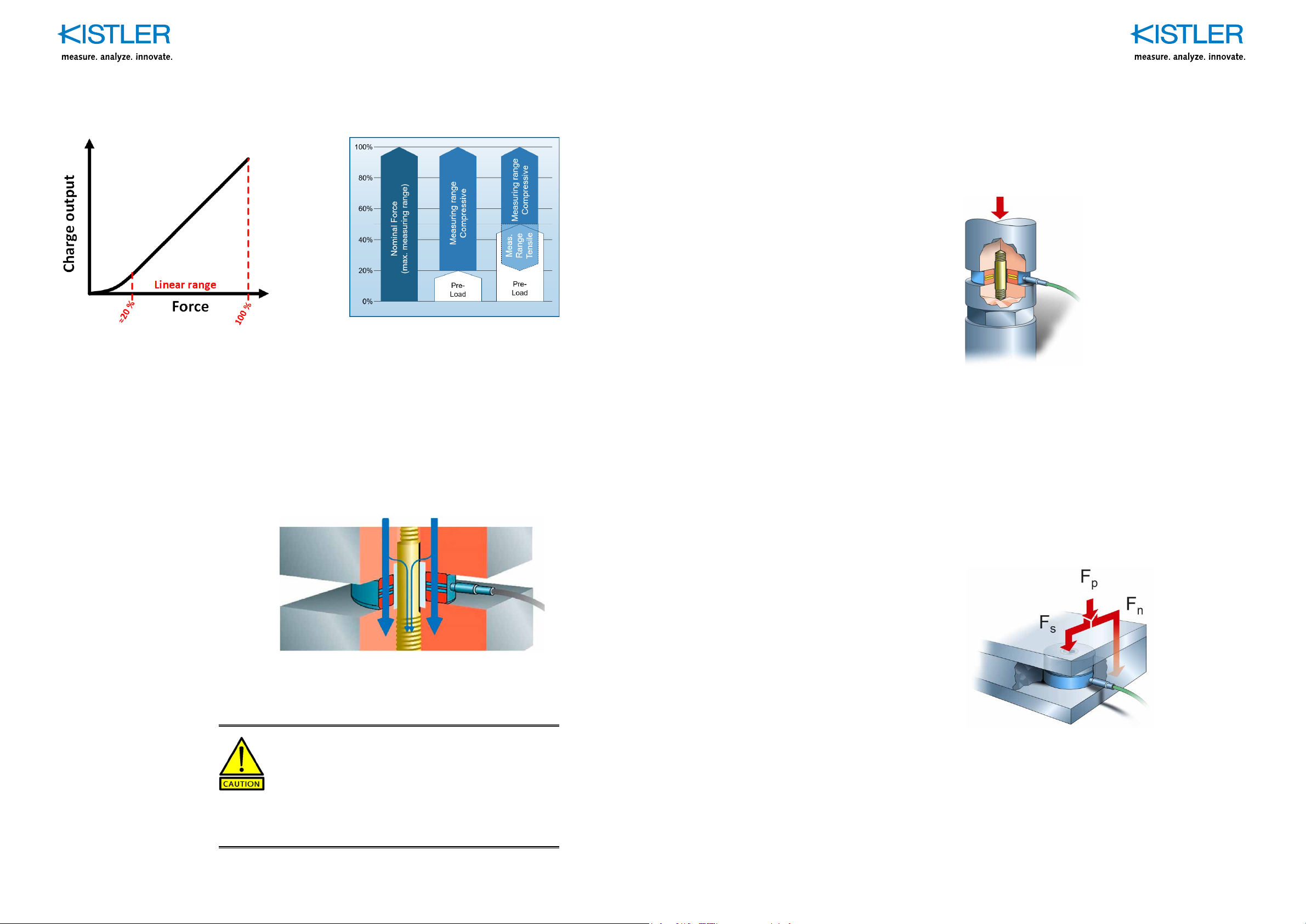
5.2 Range selection and threshold .........................................................................................34
5.3 Measuring high-frequency phenomena ............................................................................35
5.4 Measuring quasistatic phenomena...................................................................................35
5.5 Instructions and safety precautions ..................................................................................36
Total pages 55
6. Calibration and maintenance...................................................................................................37
6.1 In-Situ calibration of force sensors ...................................................................................37
6.1.1 Working point calibration by peak value comparison ..........................................37
6.1.1.1 Test system requirements....................................................................38
6.1.1.2 Reference sensor installation ..............................................................38
6.1.1.3 Load application...................................................................................39
6.1.1.4 Calibration process worksheet.............................................................40
6.1.2 Kistler calibration service.....................................................................................43
7. Troubleshooting........................................................................................................................44
7.1 Diagnosisandrecticationoffaults ..................................................................................44
7.2 Repairing Load Washer ....................................................................................................45
8. Technical data ...........................................................................................................................46
8.1 Optional accessories ........................................................................................................46
9. Appendix....................................................................................................................................47
9.1 Glossary ...........................................................................................................................47
9.2 Measurement uncertainty .................................................................................................50
9.3 Linearity ............................................................................................................................51
9.4 Frequency range ..............................................................................................................53
9.5 Inuenceoftemperature...................................................................................................54