Obere Schloßstr.131
D-73553 Alfdorf
+49 7172/93730-0
Fax +49 7172/93730-22
E-Mail: info@lorenz-sensors.com
Technical changes under reserve
Internet: www.lorenz-sensors.com
1 Contents
1Contents ..............................................................................................................................................................................2
2Imprint .................................................................................................................................................................................3
3References in this Text.......................................................................................................................................................3
4Read First ............................................................................................................................................................................4
4.1 Safety and Caution Symbols....................................................................................................................................4
4.2 Intended Use ...........................................................................................................................................................4
4.3 Dangers...................................................................................................................................................................4
4.3.1 Neglecting of Safety Notes..........................................................................................................................4
4.3.2 Remaining Dangers ....................................................................................................................................4
4.4 Reconstructions and Modifications...........................................................................................................................4
4.5 Personnel ................................................................................................................................................................4
4.6 Warning Notes.........................................................................................................................................................5
5Term Definitions..................................................................................................................................................................5
5.1 Terms ......................................................................................................................................................................5
5.2 Definition of the Pictograms on the Torque Sensor ..................................................................................................5
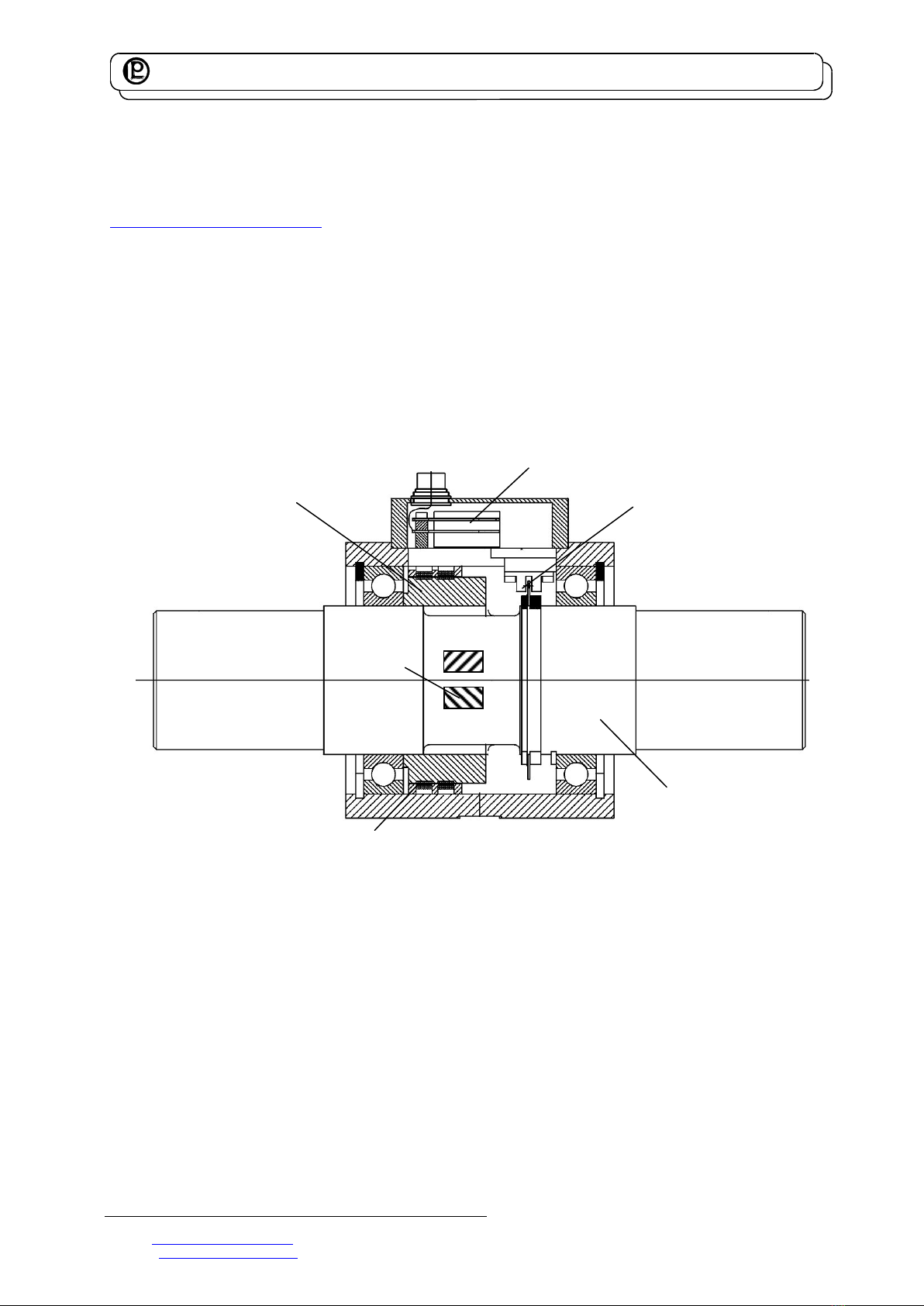
6Product Description............................................................................................................................................................6
6.1 Mechanical Setup ....................................................................................................................................................6
6.2 Electrical Setup........................................................................................................................................................6
6.3 Angle of Rotation- and Speed Measurement............................................................................................................7
6.4 Sensor Communication............................................................................................................................................7
7Mechanical Assembly.........................................................................................................................................................8
7.1 Couplings ................................................................................................................................................................8
7.1.1 Misalignment Possibilities of Single-Jointed Couplings................................................................................8
7.1.2 Double-Jointed Couplings ...........................................................................................................................8
7.1.3 Alignment of the Measurement Arrangement ..............................................................................................8
7.2 General....................................................................................................................................................................8
7.2.1 Torque Sensors of 0.1 N·m to 10 N·m.........................................................................................................8
7.3 Free-floating Assembly ............................................................................................................................................9
7.4 Foot Version Assembly ............................................................................................................................................9
8Electrical Connection .......................................................................................................................................................10
8.1 USB - Cable...........................................................................................................................................................10
8.2 Shielding Connection.............................................................................................................................................10
8.3 Running of the Transmission Cables......................................................................................................................10
8.4 Drivers and Software .............................................................................................................................................10
8.5 Calibration Control .................................................................................................................................................10
9Measuring..........................................................................................................................................................................10
9.1 Engaging ...............................................................................................................................................................10
9.2 Direction of Torque ................................................................................................................................................11
9.3 Static / Quasi-Static Torques .................................................................................................................................11
9.4 Dynamic Torques...................................................................................................................................................11
9.4.1 General .....................................................................................................................................................11
9.4.2 Natural Resonances..................................................................................................................................11
9.5 Speed Limits..........................................................................................................................................................11
9.6 Disturbance Variables............................................................................................................................................11
10 Maintenance ......................................................................................................................................................................12
10.1 Maintenance Schedule (recommended).................................................................................................................12
10.2 Trouble Shooting ...................................................................................................................................................12
11 Decommission ..................................................................................................................................................................12
12 Transportation and Storage .............................................................................................................................................12
12.1 Transportation .......................................................................................................................................................12
12.2 Storage..................................................................................................................................................................13
13 Disposal.............................................................................................................................................................................13
14 Calibration.........................................................................................................................................................................13
14.1 Proprietary Calibration ...........................................................................................................................................13
14.2 DKD-Calibration.....................................................................................................................................................13
14.3 Re-Calibration........................................................................................................................................................13
15 Data Sheet .........................................................................................................................................................................13
16 Literature ...........................................................................................................................................................................13