T580 Basic Quadcopter LOTUS
2
Table of Contents
T580 BASIC COMPONENTS AND FUNCTION .........3
TOOLS NEEDED TO COMPLETE THE T580........................................................................................ 3
PARTS LIST..................................................................................................................................... 4
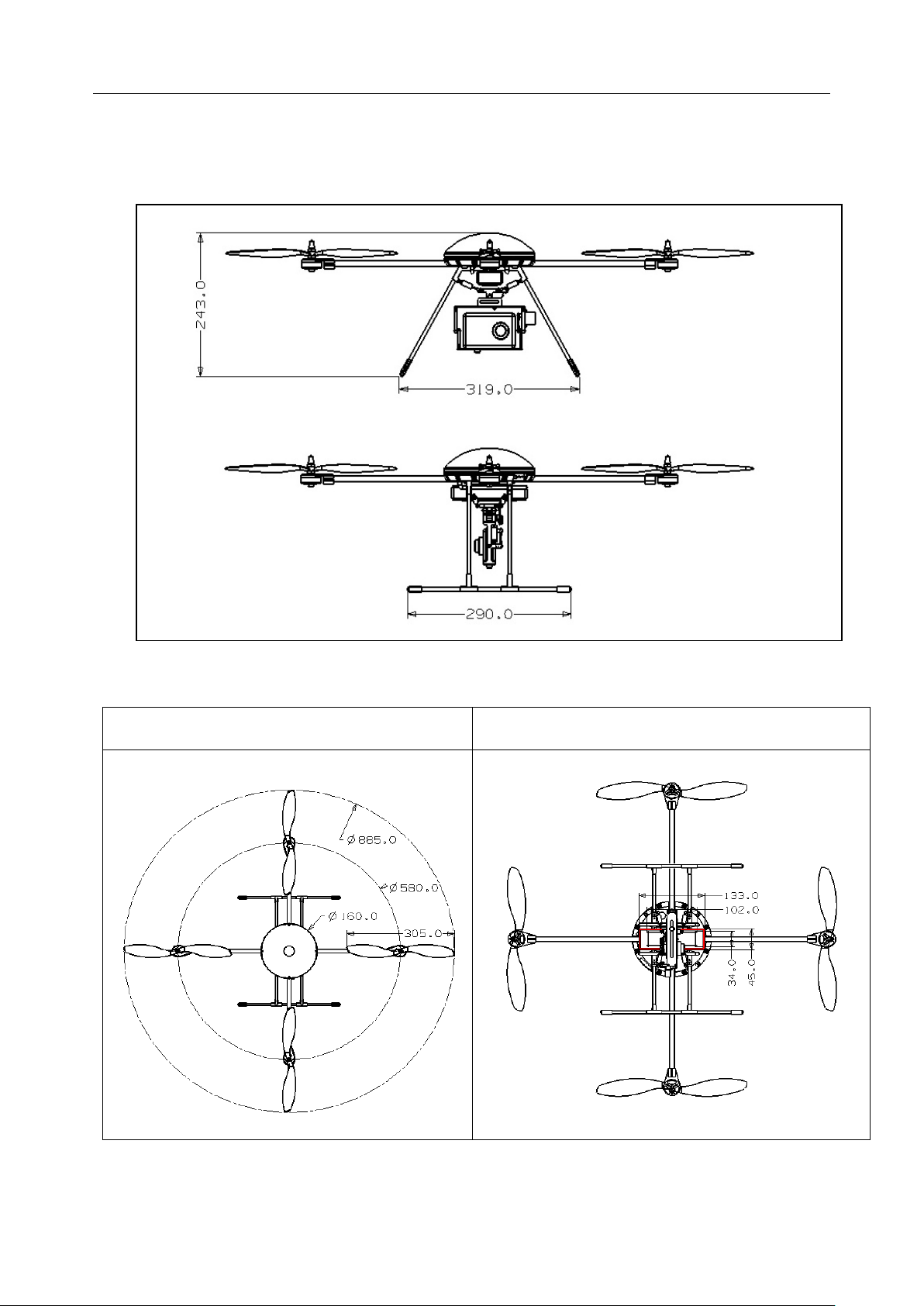
AIRCRAFT DIMENSIONS (MM):....................................................................................................... 5
TECHNICAL PARAMETERS............................................................................................................... 6
T580AIRCRAFT COMPONENTS ...................................................................................................... 7
ELECTRONIC COMPONENTS ........................................................................................................... 8
PROCESSOR SOFTWARE.................................................................................................................. 8
AIRCRAFTASSEMBLY .................................................................................................................... 9
Main body.................................................................................................................................. 9
Remote Control Receiver Installation..................................................................................... 12
RADIO SETTINGS .................................................................................................................. 13
Powering Up for the First Time............................................................................................... 13
Initialization Beep Tones:........................................................................................................ 13
FIRST FLIGHT........................................................................................................................ 14
WARNING: PLEASEREAD BEFOREYOUR FIRST TESTFLIGHT ............................. 14
4. Control Direction.............................................................................................................. 14
BUILIT IN SAFETYFEATURES.............................................................................................. 17
1. Loss of RC Signal............................................................................................................. 17
2. Start-Up throttle protection:............................................................................................. 17
3. In-flight Protection during RC Signal lost ....................................................................... 17
4. Low battery protection ..................................................................................................... 17
5. Beeping Tone Summary:................................................................................................... 18
FEEDBACK ................................................................................................................................... 18
UPGRADE PARTS ..................................................................................................................... 19
PAN TILT ZOOM (PTZ) CAMERA MOUNT........................................................................... 19