T580 四旋翼飞行器
第2 页
consequences.
NOTE: If you start using this product, you agree to the above
agreement. Hope this product will give you a satisfactory flying fun.
目 录
前言 ................................................................................................................................................................................4
1.功能特性 ................................................................................................................................................................5
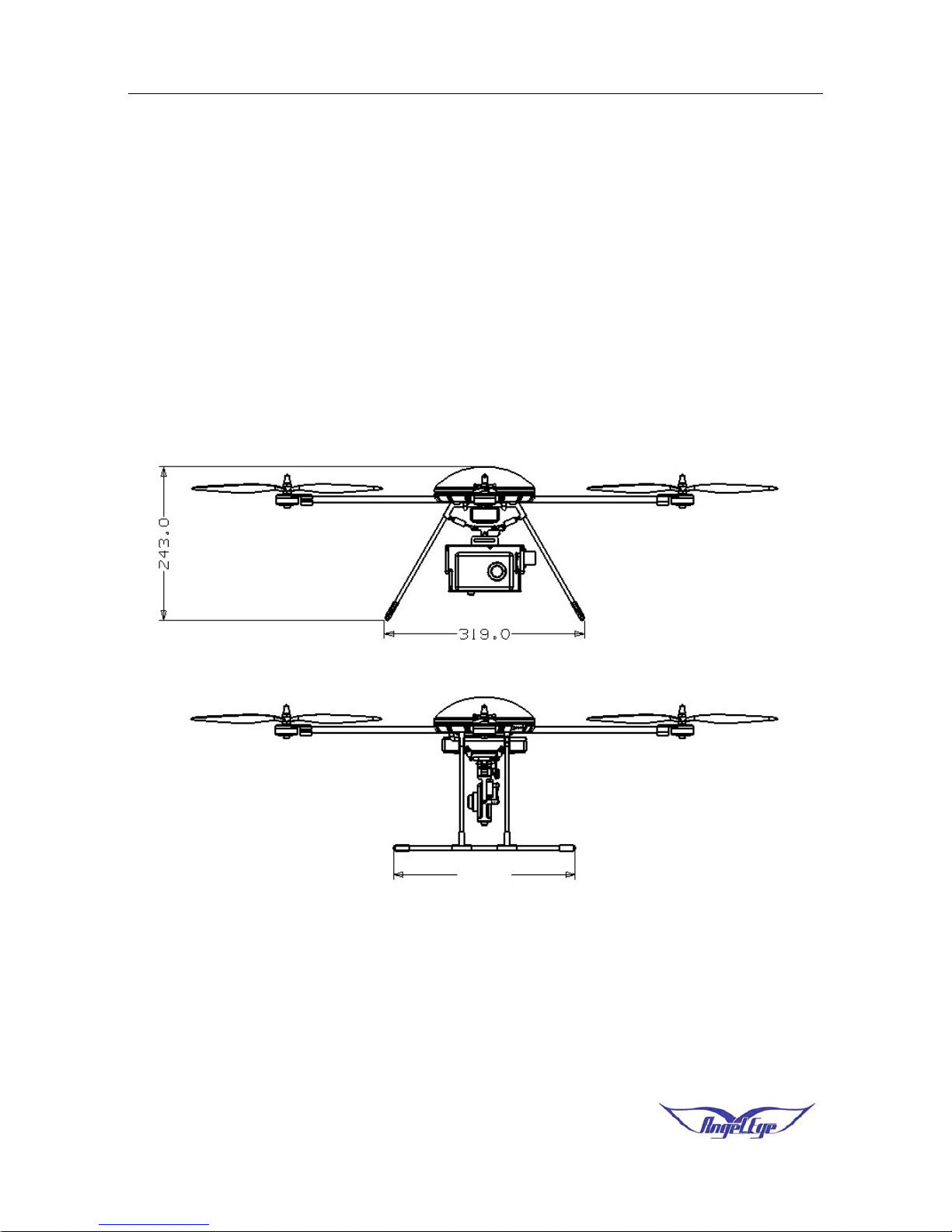
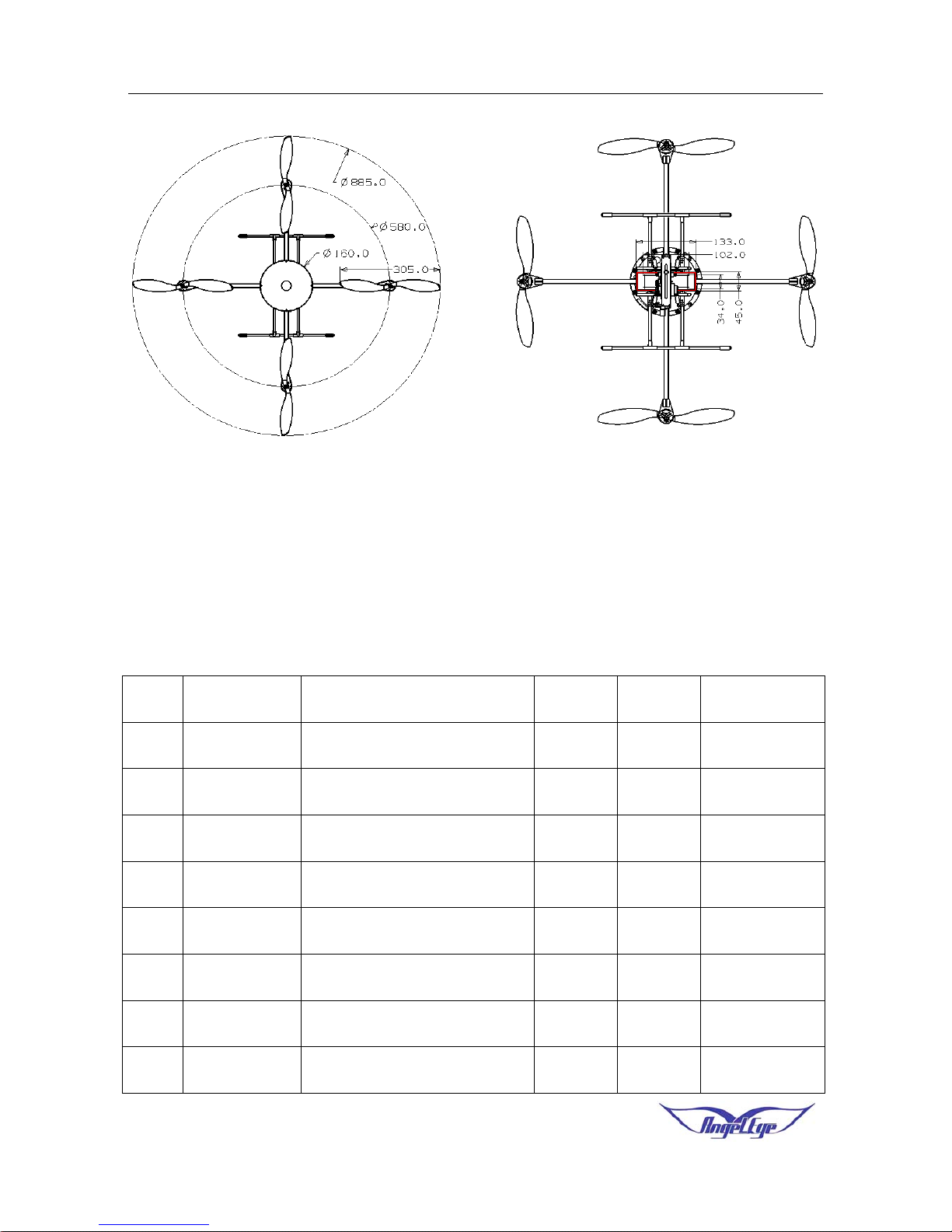
2.整机外观 ................................................................................................................................................................6
3.配置说明 ................................................................................................................................................................7
4.技术参数 ................................................................................................................................................................8
二 部件名称 ................................................................................................................................................................10
1.机体部件 ..............................................................................................................................................................10
2.电子设备 .............................................................................................................................................................. 11
3.软件系统 .............................................................................................................................................................. 11
三 整机组装 ................................................................................................................................................................12
1.主体 ......................................................................................................................................................................12
2.脚架 ......................................................................................................................................................................13
3.螺旋桨 ..................................................................................................................................................................14
4.云台 ......................................................................................................................................................................14
四 连接设置 ................................................................................................................................................................16
1.接收机连接 ..........................................................................................................................................................16
2.电池安装 ..............................................................................................................................................................18
3.遥控器设置 ..........................................................................................................................................................18
4.操作与动作 ..........................................................................................................................................................19
五 开始飞行 ................................................................................................................................................................23
1.起飞前的准备 ......................................................................................................................................................23
2.起飞与降落 ..........................................................................................................................................................23
3.信号与迫降 ..........................................................................................................................................................23
4.低电保护 ..............................................................................................................................................................24
六 操作提示说明 ........................................................................................................................................................24
七 装箱清单 ................................................................................................................................................................25
八 版本说明 ................................................................................................................................................................26
九 支持和帮助 ............................................................................................................................................................26