Table of contents
1. Executive summary..............................................................................................................................4
1.1 Legend.........................................................................................................................................6
2. What’s in the box..................................................................................................................................7
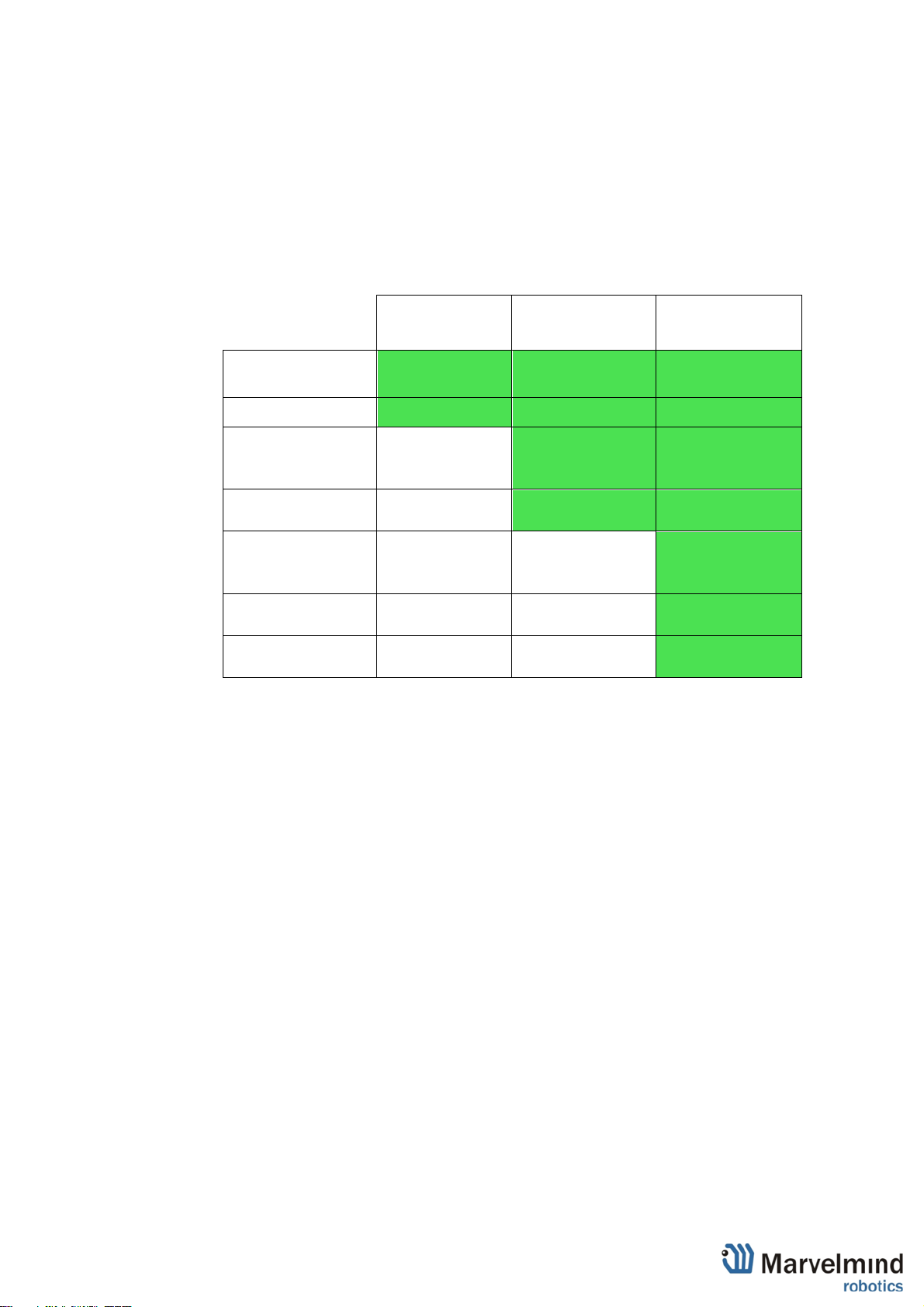
2.1 Basic configuration.......................................................................................................................8
2.2 Standard configuration .................................................................................................................9
2.3 Advanced configuration.............................................................................................................. 10
3. System elements................................................................................................................................ 11
3.1 Marvelmind Boxie....................................................................................................................... 11
3.1.1 Powertrain.................................................................................................................................. 11
3.2 Obstacle detection and avoidance.............................................................................................. 12
3.3 Navigation and positioning ......................................................................................................... 14
3.3.1 Marvelmind Indoor “GPS” ........................................................................................................... 15
3.3.2 Omni-Microphone-IP67 .............................................................................................................. 16
3.3.3 Intel RealSense (Available in Standard and Advanced configurations)....................................... 17
3.4 Touch screen control.................................................................................................................. 18
3.5 Control system ........................................................................................................................... 19
4. Robot’s controls and basic operations description .............................................................................. 20
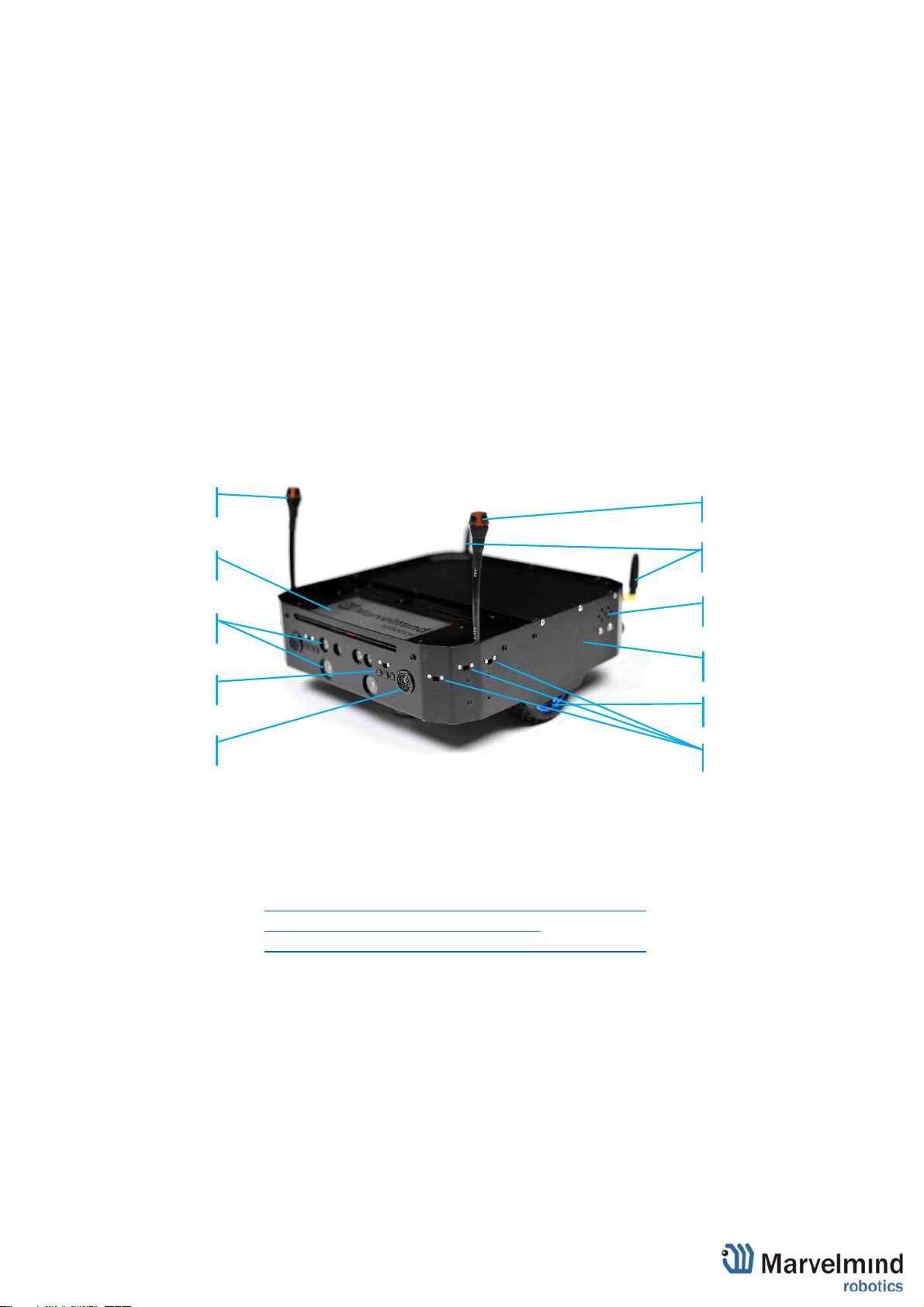
4.1 Back control panel...................................................................................................................... 20
4.2 Charging..................................................................................................................................... 21
4.3 Turning on the Boxie .................................................................................................................. 23
4.3.1 Do not disturb mode................................................................................................................... 27
5. Setting up the autonomous robots...................................................................................................... 30
5.1 Software Pack............................................................................................................................ 30
5.2 One-time flash, for SW version from 7.000................................................................................. 31
5.3 Flashing via USB........................................................................................................................ 32
5.4 Test launch................................................................................................................................. 34
5.5 Launching Boxie in the custom map........................................................................................... 37
5.6 Dashboard. Robot detailed settings............................................................................................ 38
5.7 Control Panel for robot ............................................................................................................... 39
6. Trouble shootings............................................................................................................................... 40
6.1 Display doesn’t show robot data ................................................................................................. 40
6.2 What to do if display doesn’t work .............................................................................................. 42
7. Contacts............................................................................................................................................. 43