Maxim Integrated Page 6 of 15
1.2 Accelerometer
For best results, it is recommended that accelerometer data be provided to the MAX32664A.
SpO2 calculation requires a resting condition, and the algorithm uses accelerometer data to detect
excessive motion. In such a condition, computation is paused, and the user is informed with a
motion flag.
A sensor hub accelerometer can be integrated through the I2C port of the MAX32664A. In this
case, the required driver for KX122 is already included. The user only needs to follow the
reference schematics to connect the accelerometer and enable it before starting the algorithm,
as described later in this document.
Alternatively, a host-side accelerometer can be used. In order to use the host-side accelerometer:
1. The host should start the accelerometer just before enabling the algorithm to maximize
the initial synchronization between the PPG and accelerometer samples. However,
accelerometer samples collected prior to receiving the confirmation of the algorithm
enable I2C command should be discarded.
2. The host is required to use a 3-axis accelerometer at a 100Hz sampling rate. If a higher
sampling rate is chosen, samples should be decimated to be synchronized with a 10ms
PPG sampling time.
3. The host must queue five accelerometer samples and feed them at the same time to the
MAX32664A using the commands shown in Table 2. The period of feeding samples
should be 200ms. Because the sensor and the host accelerometer use different clock
sources, exact synchronization between them is not possible.
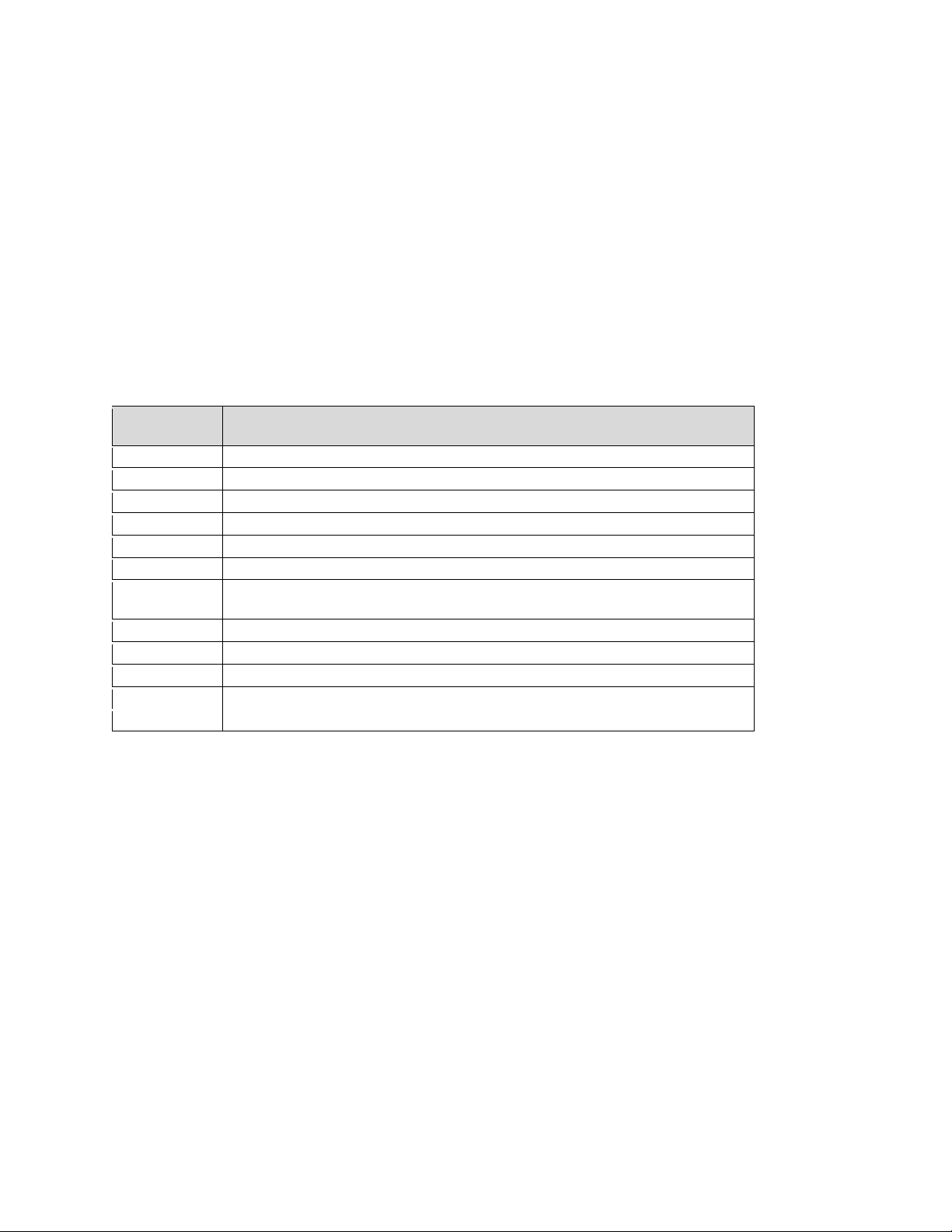
Table 2. Host-Side Accelerometer—Sending Data to the MAX32664A
HOST COMMAND
(HEX) DESCRIPTION
RESPONSE
DESCRIPTION
Enable the host accelerometer.
AA 13 00 04 Read the sensor sample size for
the accelerometer (optional). AB 00 06
number of bytes per
The following should be executed periodically at 200ms:
AA 14 00 [Sample
1 values] …
[Sample N values]
Write data to the input FIFO of the
sensor hub.
Each sample has three 2-byte
integer values for X, Y, and Z in
milli-g.
AB 00 Success
AA 00 00 Read the sensor hub status. AB 00 00
Success; sensor hub
not busy