)
Max. torque ................................................................................................ 218 mNm
Max. permissible speed (restricted by Encoder) ..................................... 12000 rpm
Max. efficiency .................................................................................................. 70 %
Torque constant .................................................................................... 24.3 mNm/A
Speed constant ......................................................................................... 393 rpm/V
Speed / Torque gradient .................................................................... 20.6 rpm/mNm
Rotor inertia .............................................................................................. 21.9 gcm2
Axial play at axial load < 6 N ....................................................................... 0 mm
> 6 N .................................................................. 0.14 mm
Radial play ................................................................................................ preloaded
Max. axial load (dynamic) ................................................................................. 5.5 N
Max. force for press fits (static) ....................................................................... 100 N
Max. radial loading, 5 mm from flange .............................................................. 25 N
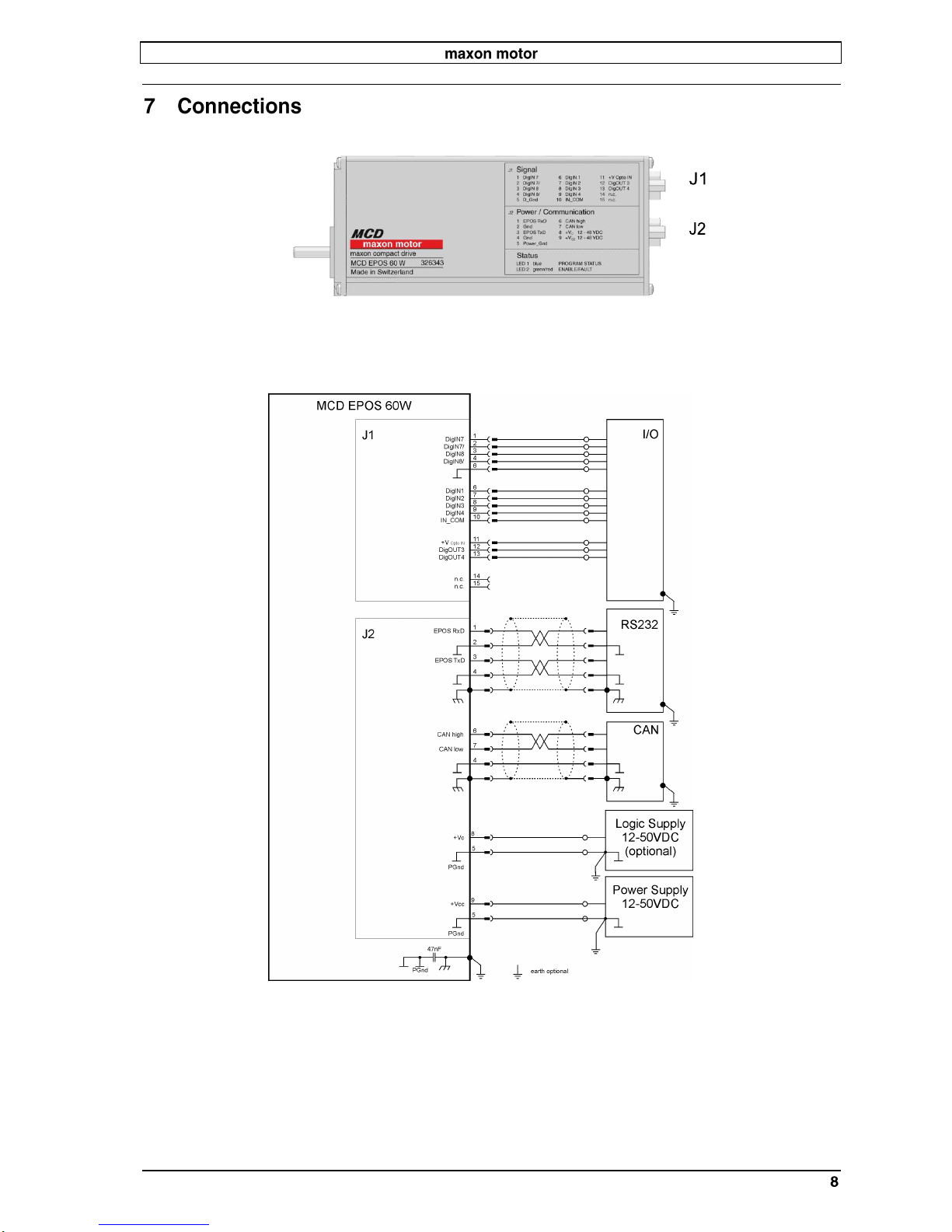
Power supply voltage VCC (Ripple < 10%) .......................................... 12 …50 VDC
Logic supply voltage VC(Ripple < 10%) (optional) ............................. 12 …50 VDC
Max. output voltage .................................................................................... 0.9 · VCC
Max. output current Imax ....................................................................................... 9 A
Continuous output current Icont ..................................... 2.6 A (Ta=25 °C, 5000 rpm)1)
Switching frequency ....................................................................................... 50 kHz
Max. efficiency .................................................................................................. 93 %
Sample rate PI - current controller ................................................................. 10 kHz
Sample rate PI - speed controller .................................................................... 1 kHz
Sample rate PID - positioning controller .......................................................... 1 kHz
Position resolution ............................................................................................ 0.09°
Position accuracy ..................................................................................... typical ± 1°
Position reproducibility ........................................................................ typical ± 0.09°
Hall sensor signals ................................. Hall sensor 1, Hall sensor 2, Hall sensor 3
Encoder signals .............................................................................. 1000 Increments
A, A\, B, B\, I, I\ (max. 200 KHz)
Digital input 1 (“General Purpose”) ........ opto-isolated ..................... +9 ... +24 VDC
Digital input 2 (“Home Switch”) .............. opto-isolated ..................... +9 ... +24 VDC
Digital input 3 (“Positive Limit Switch”) .. opto-isolated ..................... +9 ... +24 VDC
Digital input 4 (“Negative Limit Switch”) . opto-isolated ..................... +9 ... +24 VDC
Digital input 7 (“High Speed Command”) ............ line receiver EIA standard RS-422
Digital input 8 (“High Speed Command”) ............ line receiver EIA standard RS-422
+V Opto IN ...................................................................................... +12 …+24 VDC
Digital output 3 (“General Purpose”) ...... opto-isolated max. 24 VDC (IL< 350 mA)
Digital output 4 (“General Purpose”) ...... opto-isolated max. 24 VDC (IL< 350 mA)