P1 selected
Step 1 - select a servo output to adjust
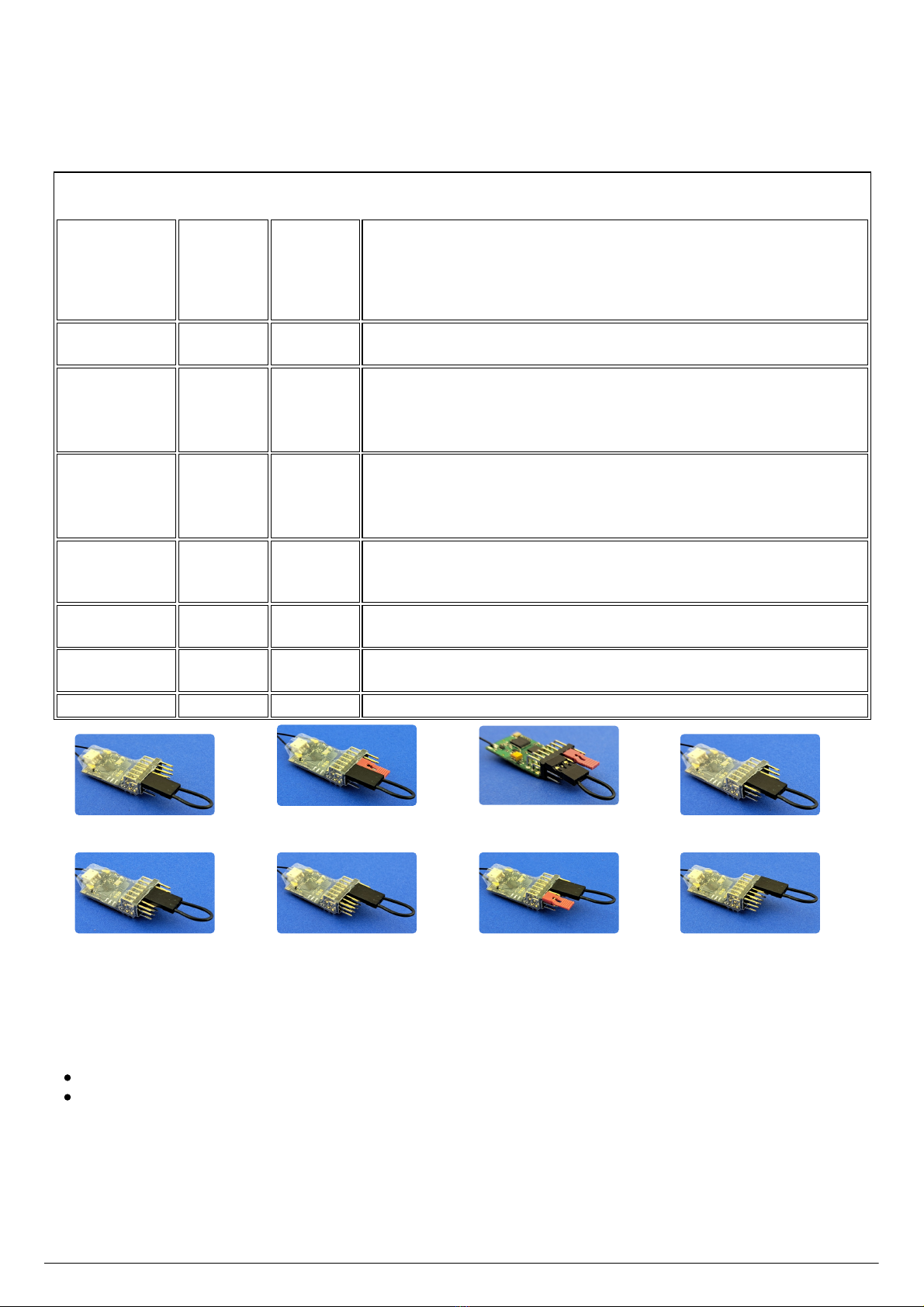
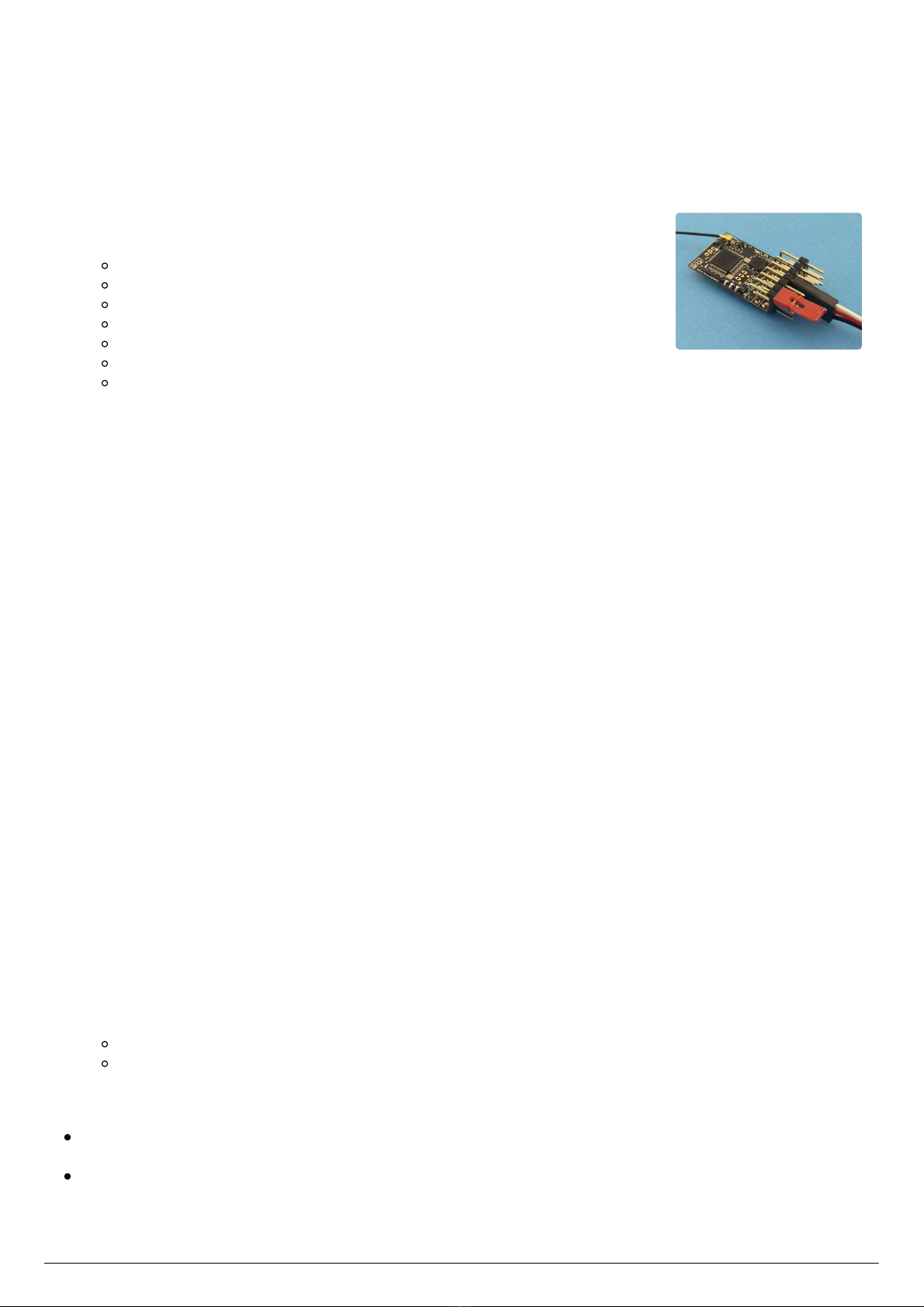
Use the small jumper plug to select a servo output to adjust. It is placed across the signal pin (top row) to be
adjusted and the adjacent signal pin. For example, to select P1 (throttle), place the small jumper plug across
signal pins 1 and 2 as shown in the image (the black connector in the image is the battery plugged into P4).
The standard MR001d setup has servo outputs on P1..P5. If your receiver has servo outputs on P6 and/or P7,
these may also be adjusted - P7 requires use of both small and large jumper plugs.
Steps:
1. MR001d must already be bound to your transmitter
2. receiver off and transmitter on
3. place the small jumper and then connect the battery:
P1: small on P1/P2, battery on P4
P2: small on P2/P3, battery on P4
P3: small on P3/P4, battery on P1
P4: small on P4/P5, battery on P1
P5: small on P5/P6, battery on P4
P6: small on P6/P7, battery on P4
P7: small on P1/P2 and large on P5/P7, battery on P4
4. the LED will flash a sequence twice to indicate the selected pin set and then flash rapidly - e.g. flash
pause flash pause rapid for P1, flash flash pause flash flash pause rapid for P2, and so on
Note: if the selected pin is not currently configured as a servo the LED will not flash the pin number
sequence and go immediately to rapid flashing; the receiver will not respond until it is switched off and
back on again
5. remove the small jumper plug when the LED is flashing rapidly, the LED will go off. Do not remove the
battery
6. connect a servo, this will respond to the transmitter control, no other output pin is active
The servo output is now selected. Jumper plugs are used on P6 and P7 (or P1 and P2 for adjusting P6 or P7)
to reverse the servo or adjust the travel end points. Reversing or end point adjustment can be repeated as
often as desired while the servo is selected. To stop the process, remove power from the receiver.
Reverse servo direction
The small jumper plug is placed across signal pins P6 and P7 (or P1 and P2 if adjusting a servo on P6 or P7).
Steps:
1. select servo output to adjust and plug servo in
2. place the small jumper across signal pins P6 and P7 (or P1 and P2 for a servo on P6 or P7)
3. the LED will flash rapidly
4. remove the jumper and the LED will stop flashing
5. the servo will respond to transmitter controls in the opposite direction to previous
The servo direction will reverse each time the procedure is executed.
Adjust servo travel
Servo travel end points can be increased or decreased using the large jumper plug on P6 (decrease) or P7
(increase) - P1 and P2 for servos on P6 or P7. The adjustment is done in small steps every ½ second and the
LED flashes for each step.
To make an adjustment:
1. move the servo to the low or high end using the transmitter control
2. use the large jumper to make changes:
on P6 to decrease the throw (P1 for servo on P6/P7)
on P7 to increase the throw (P2 for servo on P6/P7)
3. either remove the jumper or move the servo away from the end to stop the adjustment
The LED will stop flashing and the servo will stop moving when the adjustment limit is reached.
The limit for decrement is the mid point of travel so, if an end point is decreased to the maximum
amount, there will be no servo travel in that direction when the transmitter control is moved.
The limit for increment is the maximum signal value. Take care: not all servos will respond to the
maximum range of servo signal values; stop decrementing when the servo stops moving even though
the LED is still flashing.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}