Contents
1Purpose.....................................................................................................4
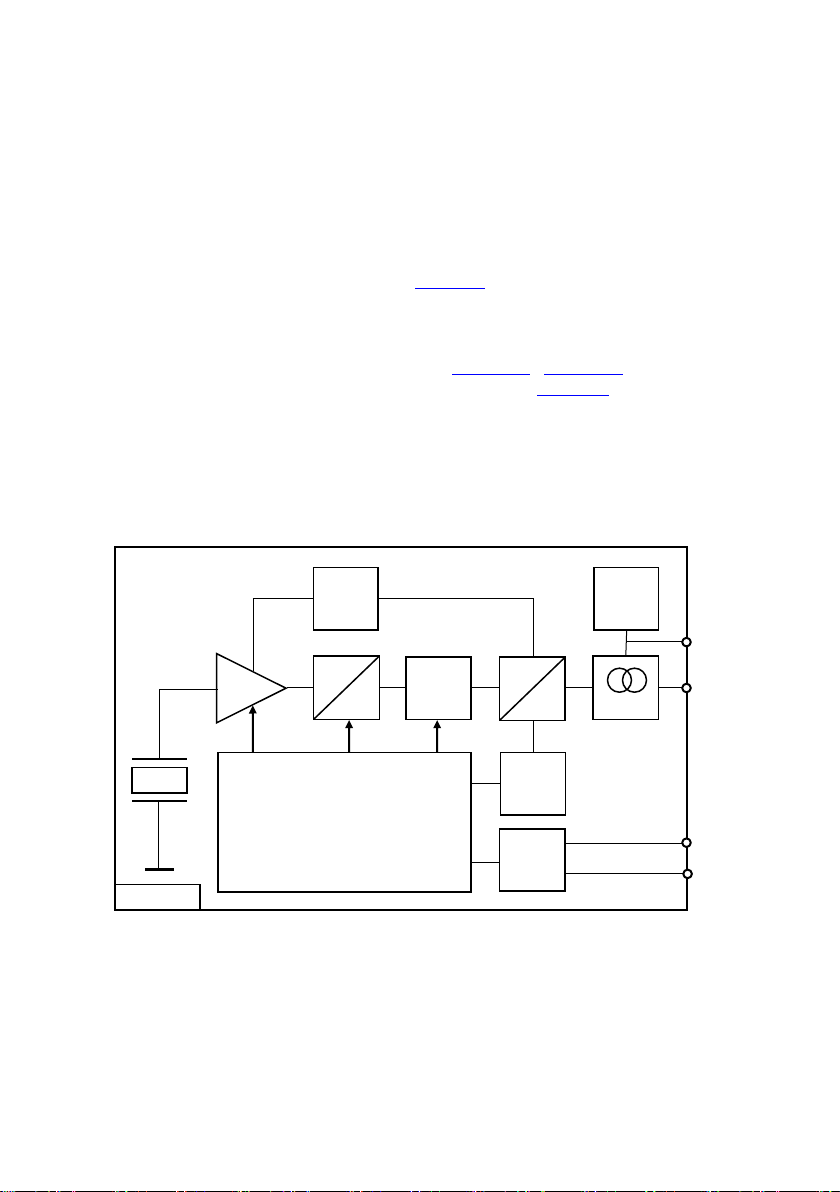
2Function....................................................................................................4
3Type Selection..........................................................................................5
3.1 Frequency Range (HP, LP).................................................................5
3.2 Measuring Range................................................................................6
3.3 Type Code ..........................................................................................6
4Sensor Operation.....................................................................................7
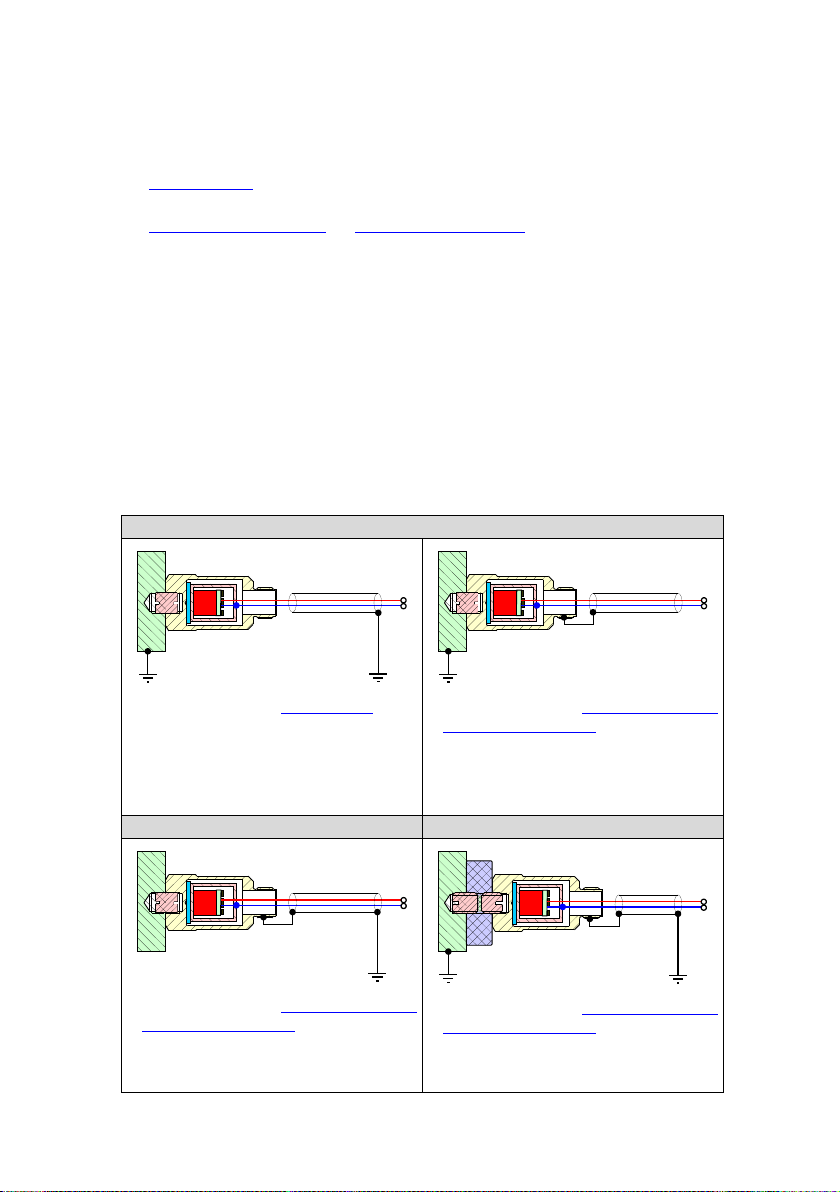
4.1 Sensor Mounting.................................................................................7
4.2 Sensor Connection .............................................................................7
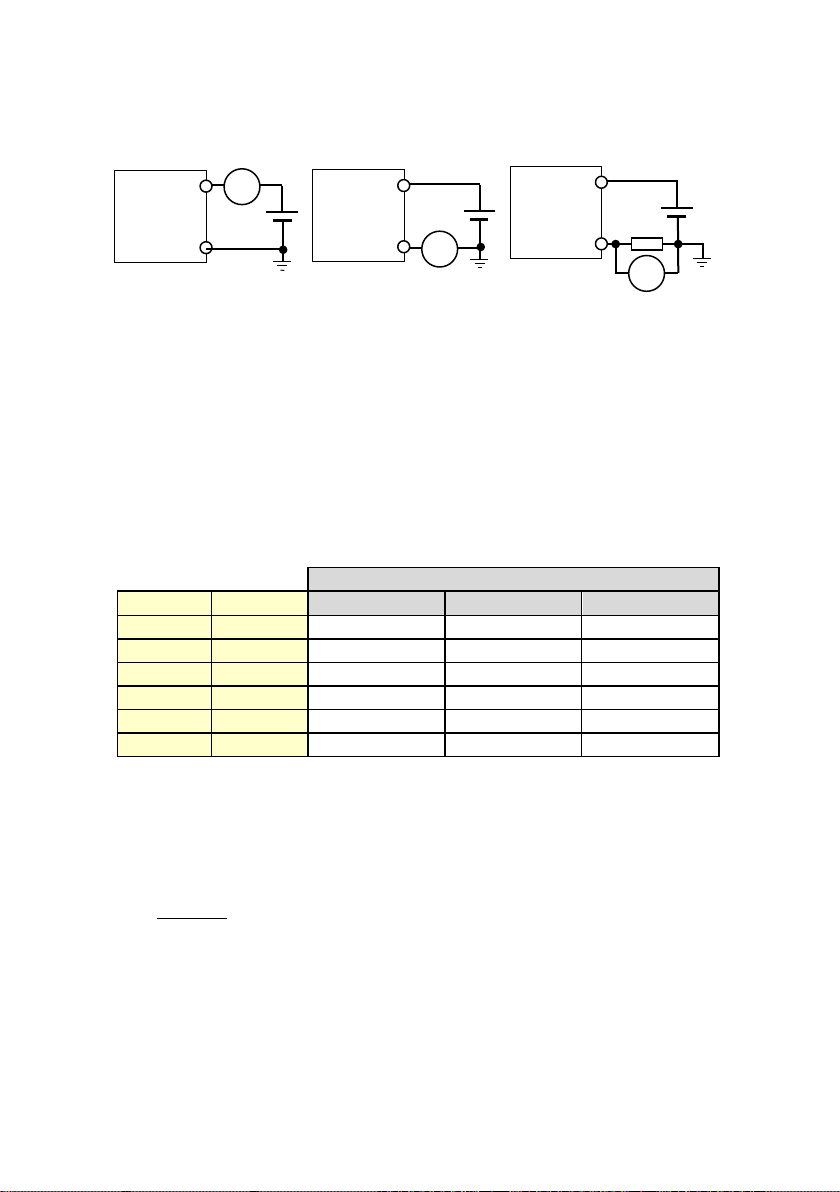
4.2.1 Connection to the Loop Supply..................................................7
4.2.2 Sensor Cable.............................................................................8
4.2.3 Grounding Concept....................................................................8
4.3 Connection of the Measuring Device..................................................9
4.3.1 Maximum Load Resistance RL...................................................9
4.4 Sensor Self-Test...............................................................................10
4.5 Measuring Mode...............................................................................10
4.5.1 Sensitivity Bi.............................................................................10
4.5.2 Calculation of Acceleration and Velocity..................................10
4.5.3 Offset Current and Noise .........................................................11
4.5.4 Linear Measuring Range xmin…xmax .........................................11
4.5.5 Maximum Dynamic Range.......................................................12
4.6 Overload Display...............................................................................12
4.7 Averaging Filter.................................................................................12
4.7.1 Number of Averages N.............................................................12
4.7.2 Settling Time T.........................................................................13
4.8 Total accuracy...................................................................................13
4.9 Error Messages.................................................................................14
4.9.1 Steps to Fix a LOOP Error.......................................................14
5Technical Data........................................................................................15
5.1 Technical Characteristics of the 4-20mA Signal Conditioning...........15
5.2 Electrical Characteristics...................................................................15
5.3Mechanical Characteristics...............................................................15
5.4 Environmental Characteristics ..........................................................15
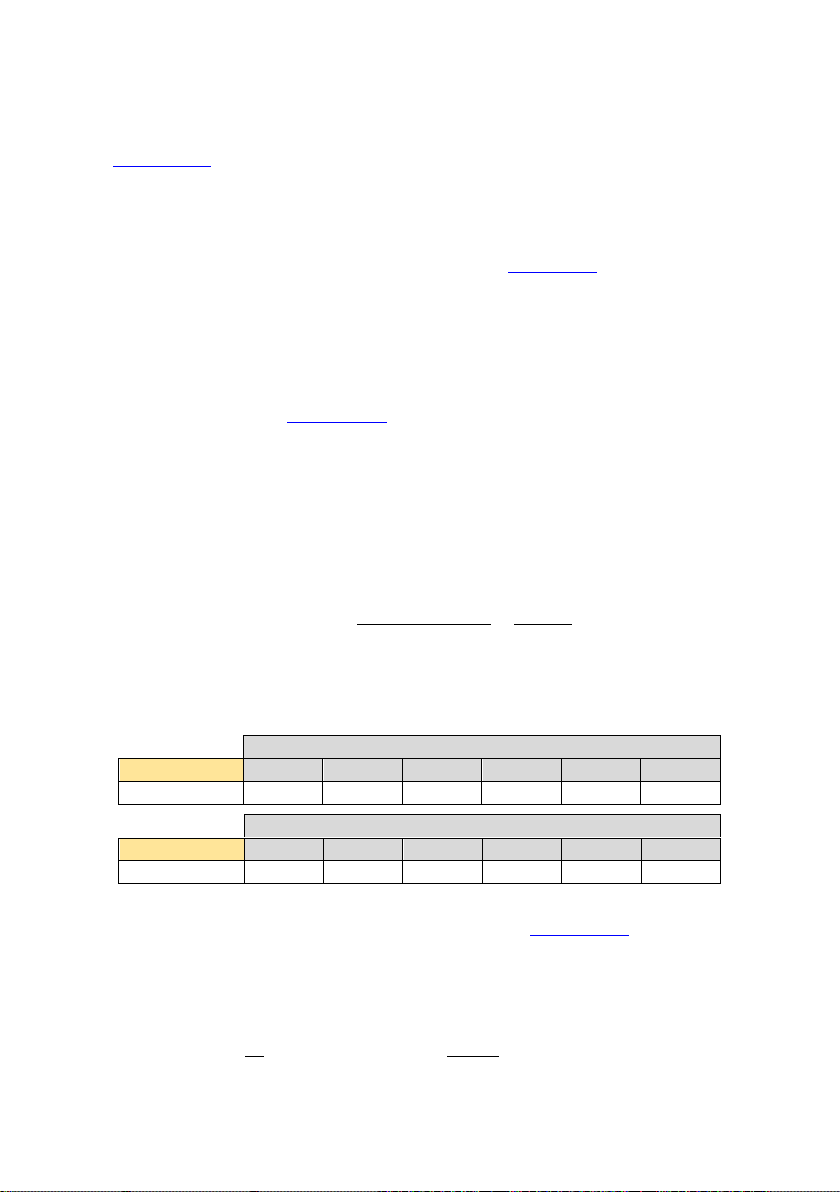
5.5 Type Tables......................................................................................16
5.5.1 Acceleration, RMS ...................................................................16
5.5.2 Acceleration, PEAK..................................................................17
5.5.3 Velocity, RMS ..........................................................................18
5.5.4 Velocity, PEAK.........................................................................18
Limited Warranty........................................................................................19
Declaration of Conformity.........................................................................19