To install the MYLAPS RC Timing System, one needs to install a detection loop, connect the decoder and mount the MYLAPS
RC transponders to the cars/Drone
Installation of the detection loop
All wiring of thedetection loop must be installed according to the drawings, to avoid a serious degradation in the
performanceof the system.
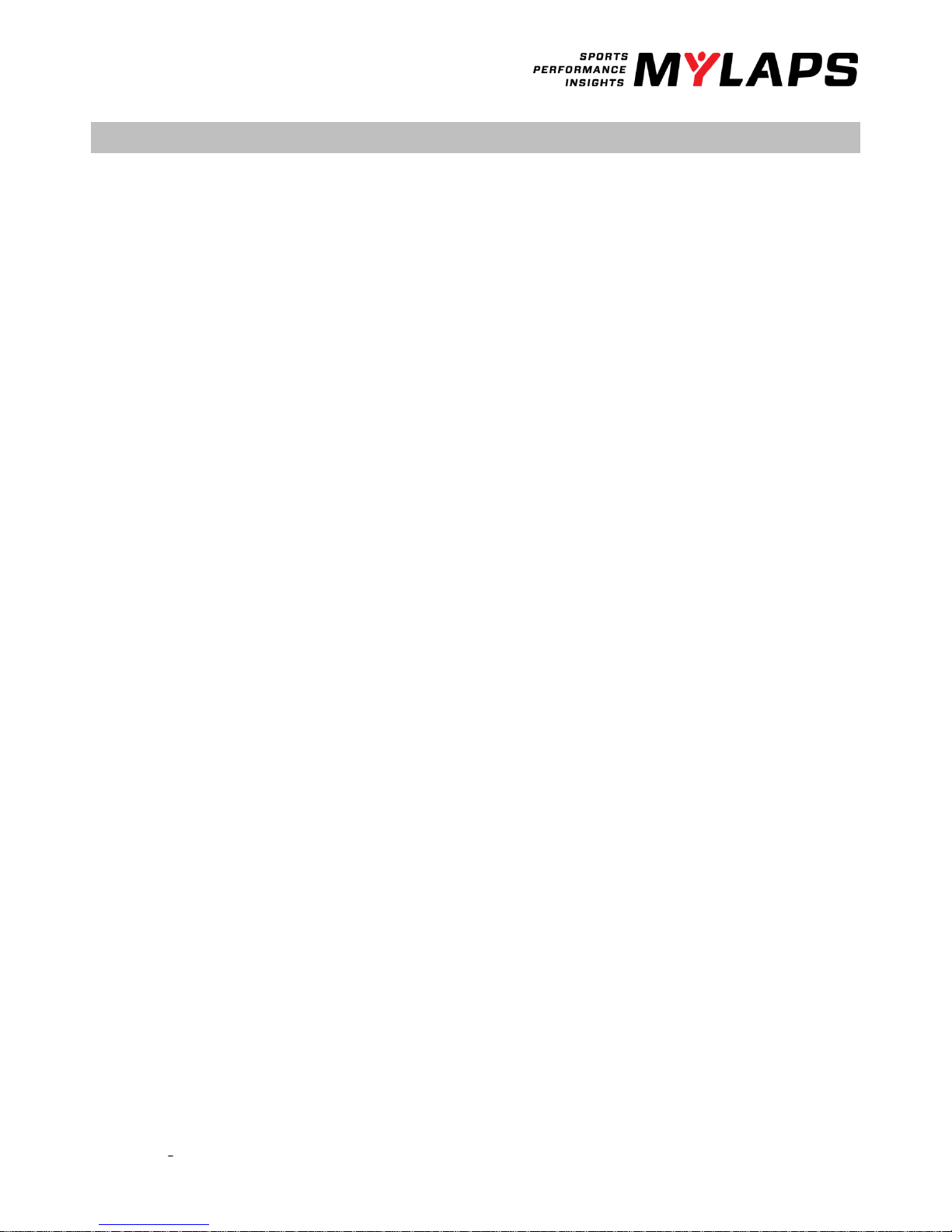
Positioning the detection loop RC Racing
1. The detectionloop mustbe positioned in such a way that the transponder is above the centre of the detection loop
when the front of the car is above the finish line. Make sure vehicles cannotpass outside the detection loop. Extend
the detection loop outside the track if necessary.
2. The detectionloop can be used for a track width of a maximum 10m (33ft).
3. Cut the slots in the track a maximum of 2cm (3/4inch) deep and 30cm (1ft) apart.
Installation of the detection loop wires and cabling For RC Racing
1. Make sure the slots are cleanand dry. This will ensure aperfect seal when the silicone is applied after installation of
the wiring. Put the wires of the detection loop in the slotsand cut theexcess length ofthe detection loop wires.
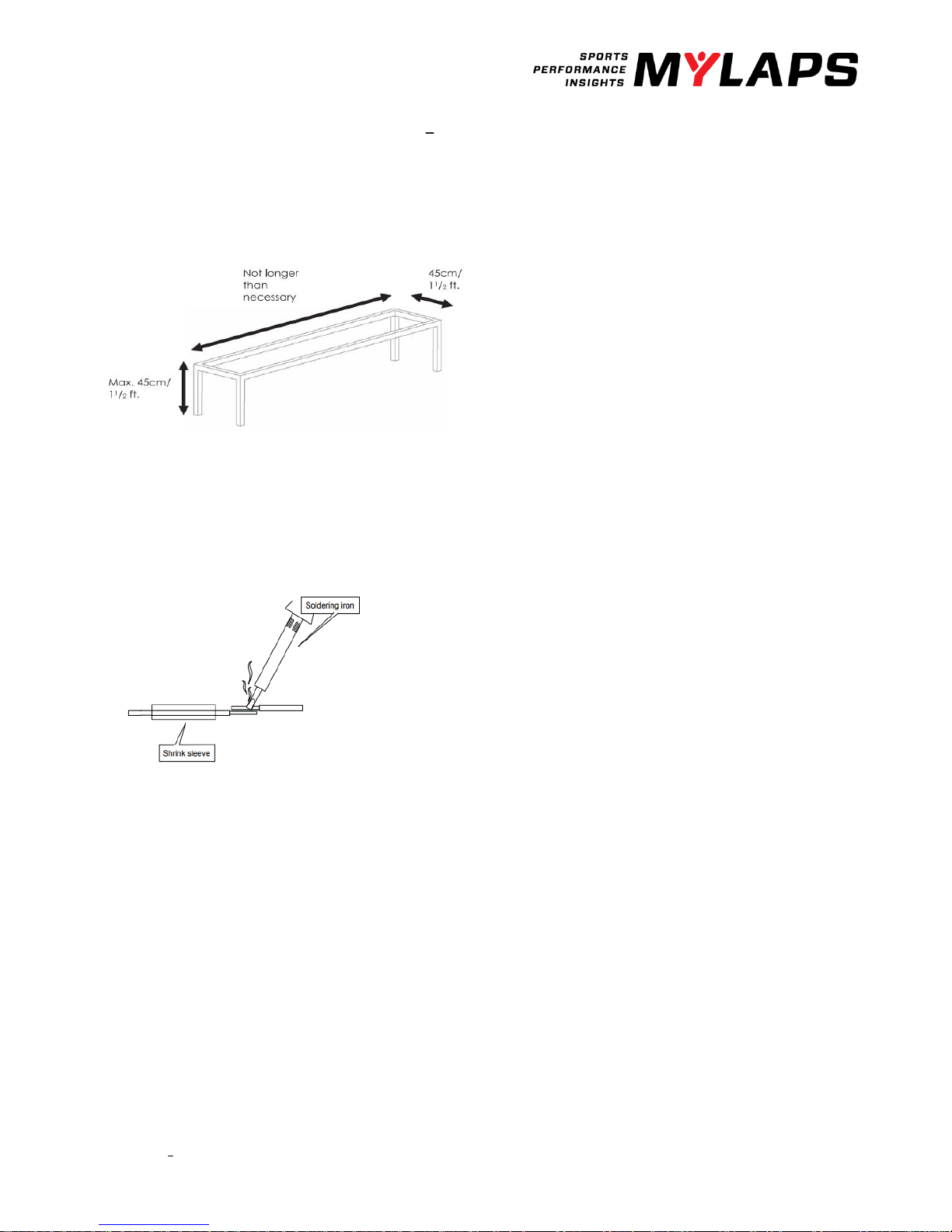
2. When all wiresare installed,put the heatshrinkage sleeve over a detection loop wire end. Then solder the loop wire
end to the short wire end of the connection box. When soldering the wires together, the solder should flow through
the entire connection and not only aroundit. Now putthe shrinkage sleeve over the soldered connection and hold
it over a heat source to shrinkthe sleeve (also see 5 the drawing on the next page). Repeatthis procedure for the
second wire end of the detection loop.
3. Fill the slot withsilicone. Make sure not to overfill the slots and that the silicone is fully under the surface of the track,
otherwise tiresmay pullout the silicone. If any silicone spills out of the slot, remove theexcess siliconeby scraping
the top with a small piece of cardboard. This also ensuresthat the silicone is pressed into the slot and into the sides
of the slot toensure a perfect seal.
There are a wide variety of silicone types available in hardware stores; it is important that the right type is used.
Silicone that canwithstand different temperatures as wellas both wet anddry conditions since weather situations
can vary should be used. If you are unsure,check the specifications of the silicone. The following types of silicone
have been shown to yield lasting results and are recommended by MYLAPS:
-levelling silicone kit. It is applied as a liquid and fills the slot completely.
x is a polyurethane-basedsilicone that retains its elasticity under a wide range of temperatures.
4. In the case ofan OFF-ROAD track, cover the loop with carpet or somethingsimilar. The carpet can then be covered
with sand. Please be awareof the max. distance of 15cm (6inch) between the transponder and the detection loop.
5. The detectionloop is sensitive to interference, sometimesemitted by nearby cables. When possible,keep other
cables 5m (15ft)away. Also make sure carson other parts of the trackwill not get closer than 5m (15ft) to the
detection loop, to avoid false inputs.