6 NAVMAN G-PILOT 3380 System Installation Manual
1-2 Using the G-PILOT 3380 system with other instruments
1-2-1 Using other instruments
The G-PILOT 3380 system can use data from
these instruments:
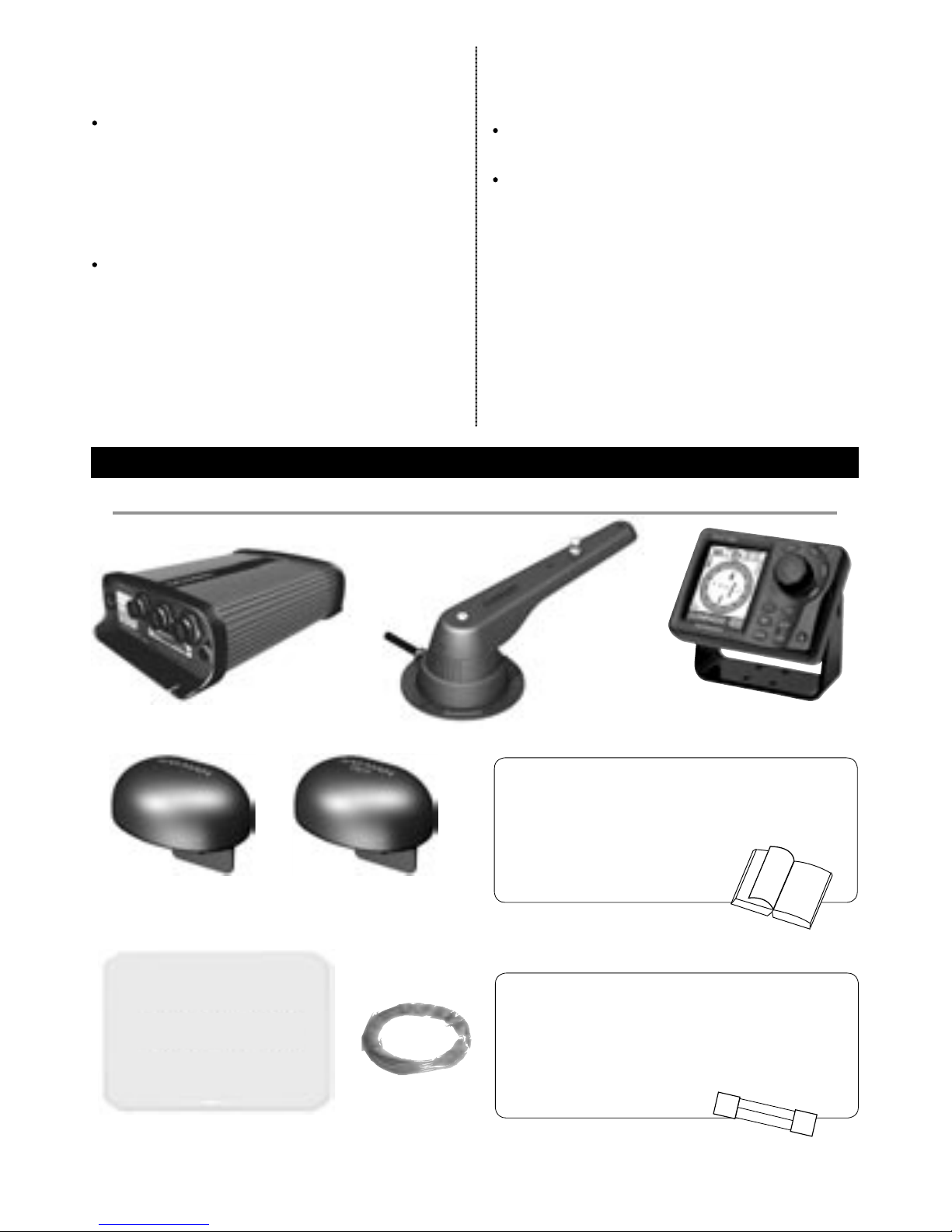
GPS: A GPS or chartplotter, such as a Navman
TRACKER 5000 series chartplotter must be
connected to the G-PILOT 3380 system for
the G-PILOT to operate in GPS mode (see the
G-PILOT 3380 Operation Manual).
Note: GPS must be via NMEA input.
WIND: A wind instrument, such as a
Navman WIND series, must be connected
to the G-PILOT 3380 system for the G-PILOT
to operate in WIND mode (see the G-PILOT
3380 Operation Manual).
SPEED: A speed instrument, such as:
Navman’s SPEED with a paddlewheel
speed sensor
or a GPS or chartplotter, such as
Navman’s TRACKER 5000 or TRACKFISH
6600 series can be connected to the
G-PILOT 3380 system to increase
steering accuracy.
Note: The speed from a paddlewheel sensor
is the speed that the boat is moving through
the water. The speed from a GPS is the speed
over the ground. If there is a water current
then these two speeds will be different. If
the G-PILOT 3380 system is connected to
an instrument with a paddlewheel sensor
and to a GPS, then the G-PILOT 3380 system
will automatically use the speed from the
paddlewheel sensor instrument.
1-2-2 NavBus
NavBus is a Navman proprietary system that
allows systems of multiple instruments to be
built using a single set of transducers. When
instruments are connected by NavBus:
If you change the units, alarms or
calibration in one instrument, then the
values will automatically change in all other
instruments of the same type.
Each instrument can be assigned to a
group of instruments, called a NavBus
group (see NavBus group in the Setup >
Comms menu, in the G-PILOT 3380 Operation
Manual). If you change the backlight in an
instrument in group 1, 2, 3 or 4 then the
backlight will automatically change in the
other instruments in the same group. If
you change the backlight in an instrument
in group 0 then no other instruments are
affected.
If an alarm sounds, mute it on any
instrument which can display that alarm.
For more information, refer to the NavBus
Installation and Operation Manual.
Note: GPS must be via NMEA input.
NavBus and the G-PILOT 3380 system
The G-PILOT 3380 system will automatically
work with additional G-PILOT 3380 displays
or G-PILOT 3100 displays.
The G-PILOT 3380 system can receive wind
data from Navman’s WIND over NavBus.
The G-PILOT 3380 system can receive speed
data from Navman’s SPEED over NavBus.
1-2-3 NMEA
NMEA is an industry standard, but is not as
flexible as NavBus as it requires dedicated
connections between instruments. The
G-PILOT 3380 system has one NMEA input port
and one port that can be configured to be an
input or an output (See G-PILOT 3380 Operation
Manual).
G-PILOT 3380 system NMEA inputs
GPS: The G-PILOT 3380 system can receive
NMEA GPS data from a compatible GPS or
chartplotter, such as Navman’s TRACKER 5000
series chartplotter:
XTE (from APA, APB or XTE sentences) is
required for the G-PILOT 3380 system to
use GPS mode
BRG (from APA sentences) and BOD (from
APA or APB sentences) are optional and
improve performance
COG (from VTG sentences) is optional and
can be displayed.