
1. Introduction
Attention: If you are assembling a Zumo Robot for Arduino using the Zumo Shield for
Arduino [https://www.pololu.com/product/2504],please follow the more specialized assembly
instructions for that product [https://www.pololu.com/docs/0J57] instead of the ones in this
document!
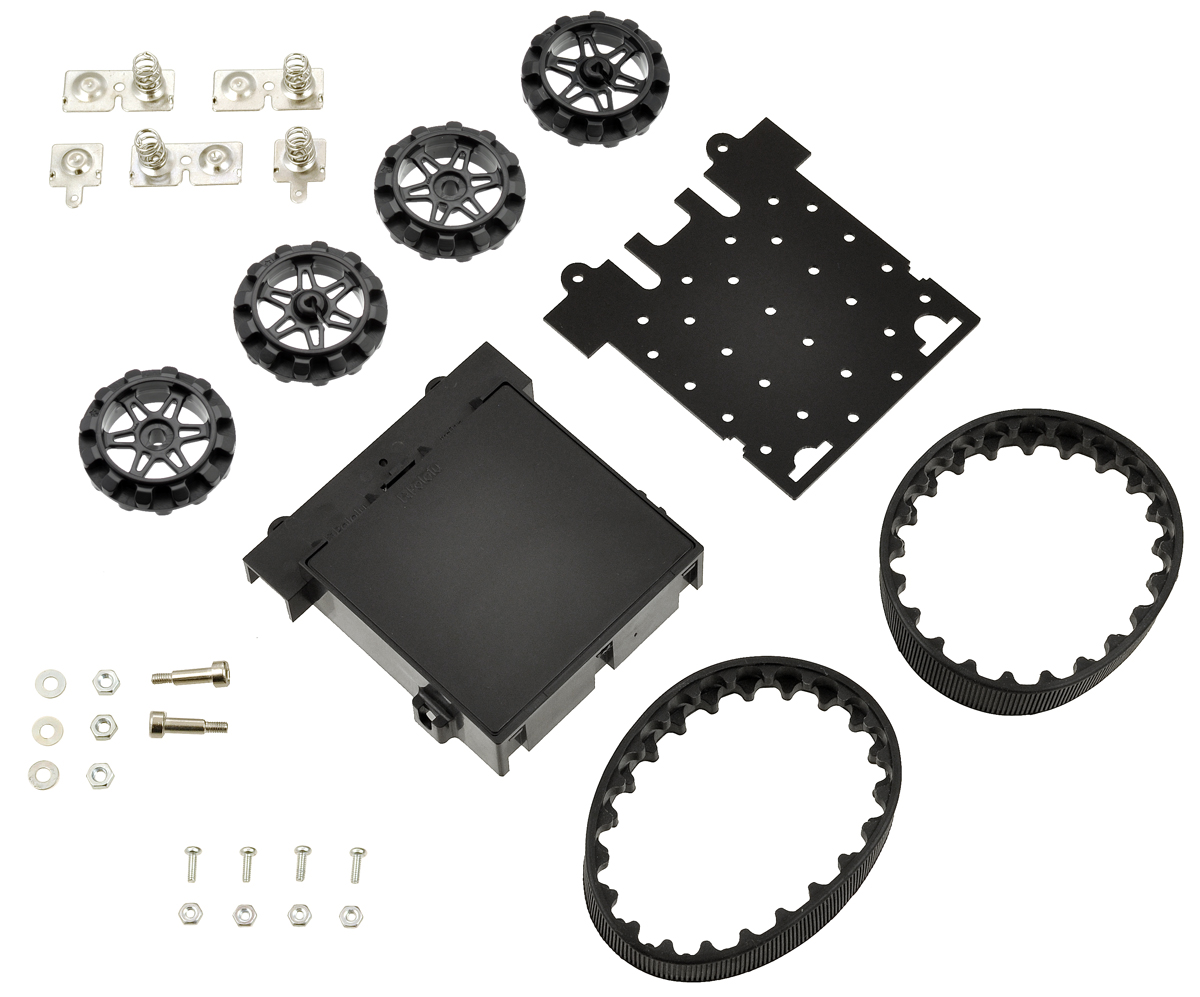
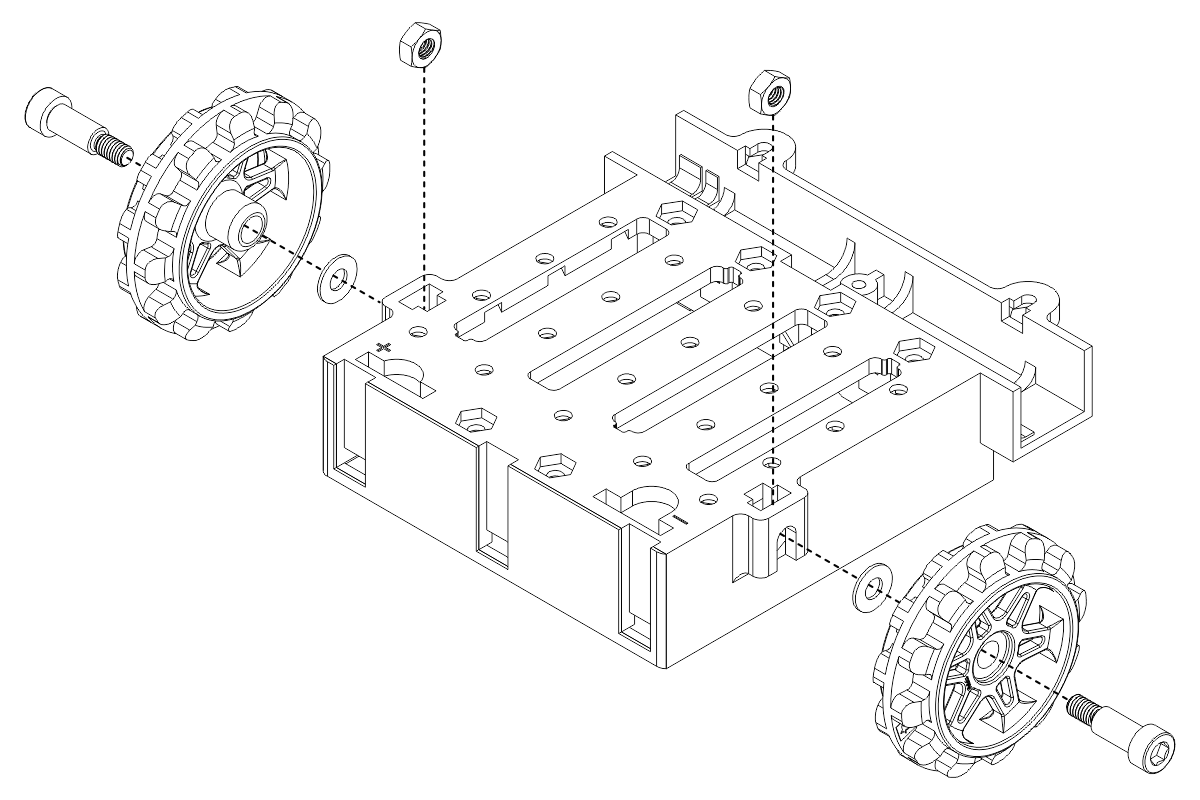
The Pololu Zumo chassis kit contains the components you need to build a small, high-performance
tracked robot platform. It measures less than 10 cm on each side, making it compact enough to qualify
for Mini Sumo competitions. The main body of the chassis is composed of black ABS plastic and has
sockets for two micro metal gearmotors and a compartment for four AA batteries (not included), with
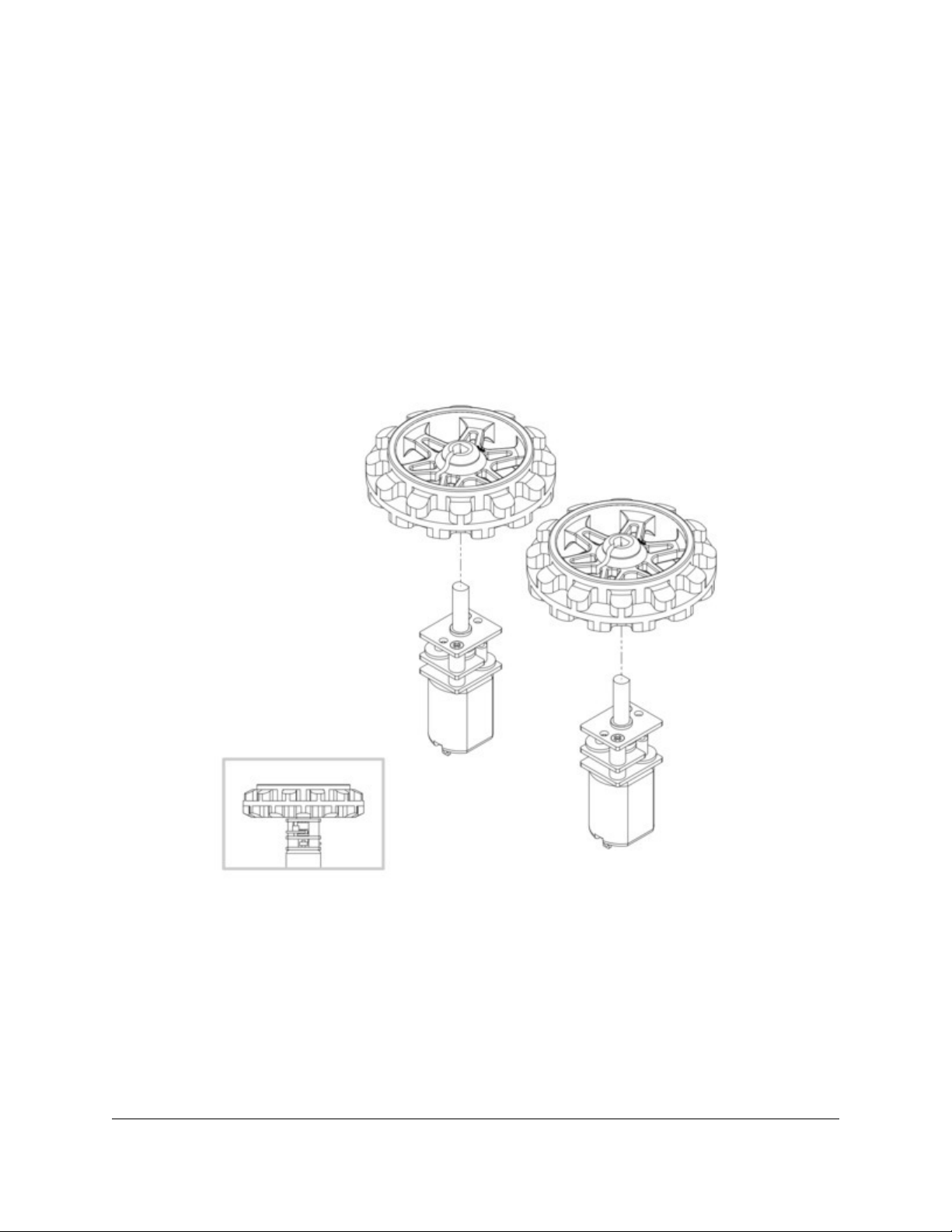
battery terminals that protrude through the chassis and can be accessed from the top. Each side of
the chassis has an idler sprocket that spins freely and a drive sprocket that connects to a motor, which
together support a flexible one-piece silicone track. A black acrylic plate is included with the chassis; it
holds the motors in place and can be used for mounting your electronics, such as your microcontroller,
motor drivers, and sensors.
Kit Components
Pololu Zumo Chassis User’s Guide © 2001–2019 Pololu Corporation
1. Introduction Page 2 of 12
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}