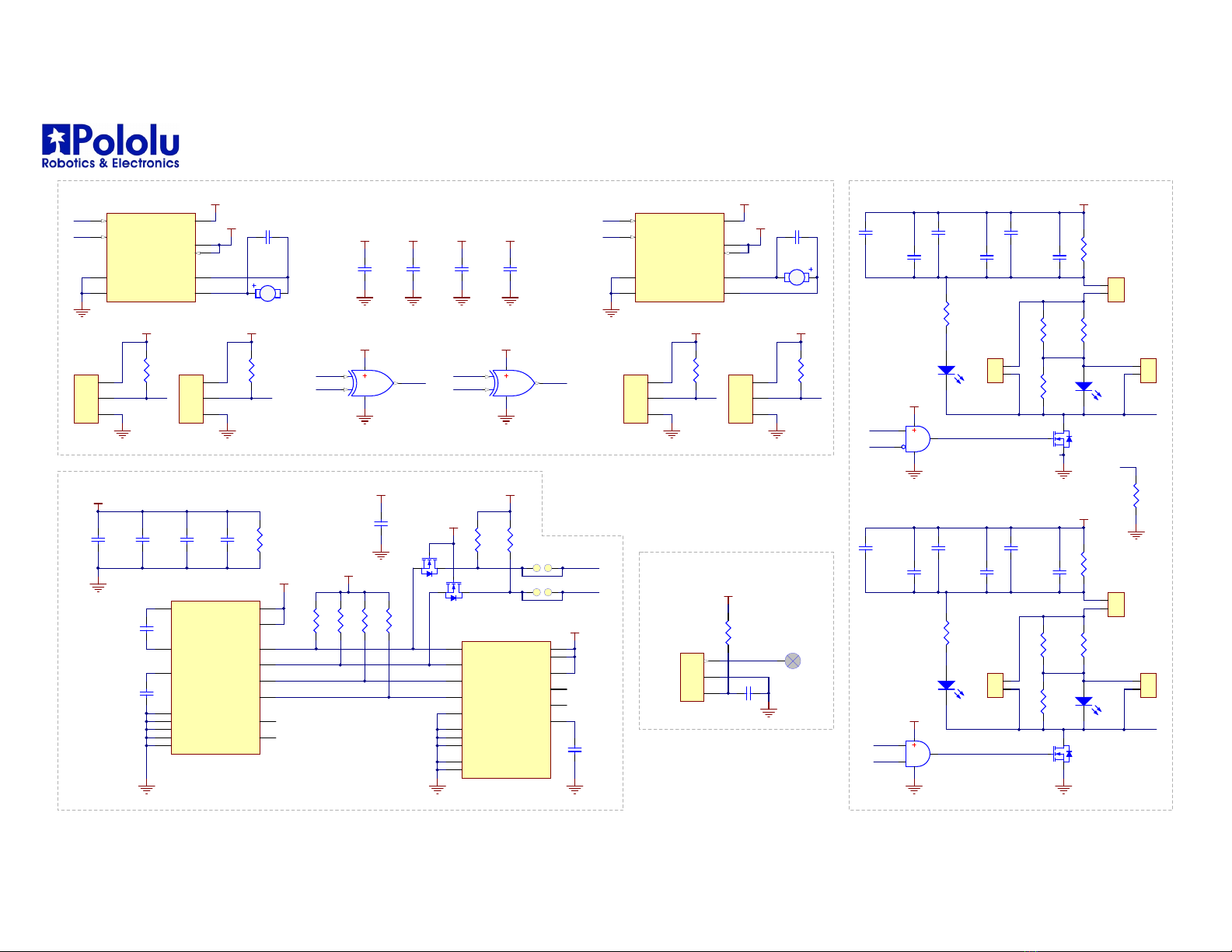
Zumo 32U4 main board
©2015 Pololu Corporation
www.pololu.com
Schematic diagram
Motors, encoders, IMU, sensors, and emitters
Page 2 of 4
Right motor
Left motor
GND 3
VS 1
Q2
0.1 uF
C9
10k
R11
5V
GND 3
VS 1
Q2
10k
R12
5V
A5EAR
5V
GND 3
VS 1
Q2
0.1 uF
C11
10k
R13
5V
GND 3
VS 1
Q2
10k
R14
5V
PE2EAL
5V
GND
4
VM 1
VCC 8
PH
6
EN
5
nSLEEP 7
OUT1 2
OUT2 3
GND (PPAD)
9
DRV8838
ML+
ML-
MR+
MR-
3.3 nF
C6
3.3 nF
C10
D9
D15
D10
D16
5V
5V
0.1 uF
C7
GND
4
VM 1
VCC 8
PH
6
EN
5
nSLEEP 7
OUT1 2
OUT2 3
GND (PPAD)
9
DRV8838
5V
0.1 uF
C8
VBAT VBAT
5V
5V
EAR
A5
D7
5V
EAL
PE2
D8
②Implemented as 74LVC1G58 multi-function gate with pin 3 tied to pin 1
① ①
10 uF
C34
0.1 uF
C36
10 uF
C33
3V3
5V
0.1 uF
C38
D3
D2
0.1 uF
C37
3V3
3V3
10 nF
C41
10k
R31
10k
R32
10k
R28
10k
R29
5V
Q4
Q5
3V3
SDALV
SCLLV
SA0
Vdd_IO 1
SETC
2
SETP
3
SCL/SPC 4
GND
5
SDA/SDI/SDO 6
SDO/SA0 7
CS 8
INT2 9
RES(GND)
10
INT1 11
GND
12
GND
13
Vdd 14
C1
15
GND
16
LSM303D
0.22 uF
C39
4.7 uF
C40
10k
R30
3V3
VDD_IO 1
SCL/SPC
2
SDA/SDI/SDO
3
SDO/SA0
4
CS
5
DRDY/INT2 6
INT1 7
DEN
8
RES(GND)
9
RES(GND)
10
RES(GND)
11
GND
12
GND
13
CAP 14
RES(VDD) 15
VDD 16
L3GD20H
10k
R33
CS
(SCL)
(SDA)
3k
R47
A1
A1
D5
Q7
D8
IR
22
R39
1
2
NP
R43
1
2
IRL
1
2
Front left LED
Q8
D9
IR
22
R41
1
2
NP
R42
1
2
IRR
1
2
Front right LED
5V
100
R34
NP
R38
10 uF
C47
10 uF
C54
10 uF
C55 100
R35
NP
R40
D10
Red
1k
R36
D11
Red
1k
R37
D5
10 uF
C46
10 uF
C53
10 uF
C45
5V
10 uF
C44
10 uF
C51
10 uF
C52
10 uF
C43
10 uF
C50
10 uF
C42
IN2
②
5V
4
1
6
52
5V
IN14
3
6
52
③
100k
R44
D5
④Implemented as 74LVC1G97 multi-function gate with pin 1 tied to GND
③Implemented as 74LVC1G97 multi-function gate with pin 3 tied to GND
4.7 uF
100
OUT 1
GND 2
VS 3
5V
Left and right optional IR receiver connections
x2
Inertial sensors
IR emittersMotors
①Hall Effect sensor ICs in SOT-23 packages, e.g. AH1751
④
Middle left LED
Middle right LED
① ①
②
6 6
4 4
5
5
2
2
1 1