Version 02/09 UME-MCD-CA 2
ABSOLUTE ROTARY ENCODER
CANOPEN
Table of Contents
Main Features........................................................1
Mechanical Structure.............................................1
Programmable Parameters....................................1
Electrical Features.................................................1
Table of Contents.................................................2
General Security Advise......................................4
About this Manual................................................4
1. Introduction......................................................5
1.1 General CANopen Information.........................5
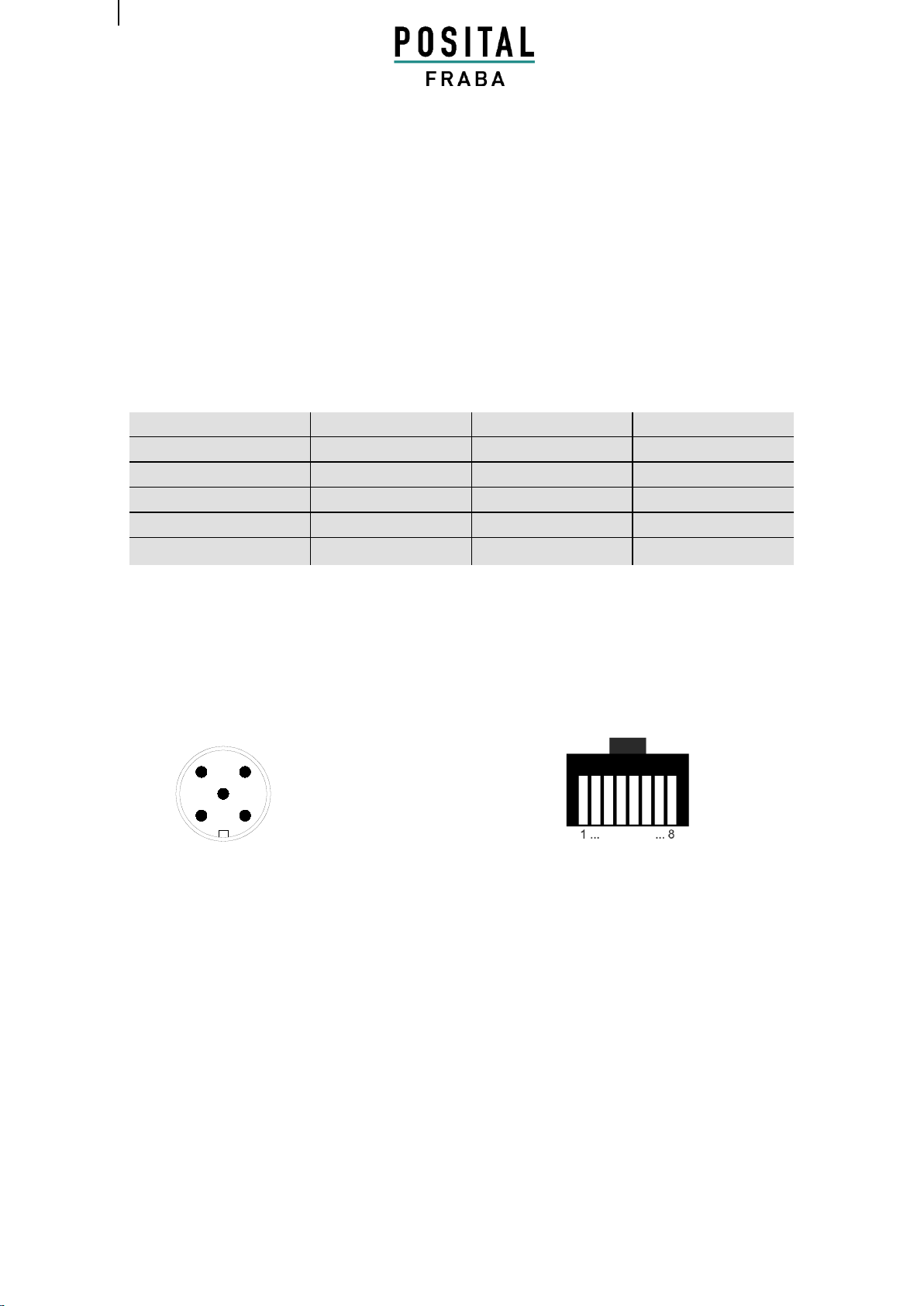
2. Installation........................................................7
2.1 Electrical Connection.......................................7
3. Technical Data..................................................9
Electrical Data........................................................9
Sensor data............................................................9
Tab. 3 Sensor data....................................................9
Flange..................................................................10
Synchro (S)..........................................................10
Blind hollow shaft (B)...........................................10
Clamp (C) ............................................................10
Minimum Mechanical Lifetime..............................10
Cable ...................................................................10
4. Configuration .................................................11
4.1 Operating Modes ...........................................11
4.1.1 General.......................................................11
4.1.2 Mode: Preoperational..................................11
4.1.3 Mode: Start - Operational............................11
4.1.4 Mode: Stopped............................................11
4.1.2 Reinitialization of the Encoder.....................12
4.2 Normal Operating...........................................12
4.3 Storing Parameter..........................................13
4.3.1 List of storable Parameter...........................13
4.3.1 Storing Procedure.......................................13
4.4 Restoring Parameters....................................14
4.5 Usage of Layer Setting Services (LSS)..........14
5. Programmable Parameters ...........................16
5.1 Programming example: Preset Value ............17
5.1.1 Set Encoder Preset Value...........................17
5.2 Communication Profile DS301 specific
objects from 1000h - 1FFFh.................................18
5.3 Manufacturer specific objects 2000h –
5FFFh..................................................................19
5.4 Application specific objects 6000h –67FEh .. 19
5.5 Object Descriptions ....................................... 20
Object 1000h: Device Type ................................. 20
Object 1001h: Error Register............................... 21
Object 1003h: Pre-Defined Error Field ................ 21
Object 1005h: COB-ID Sync................................ 22
Object 1008h: Manufacturer Device Name.......... 22
Object 1009h: Manufacturer Hardware Version... 22
Object 100Ah: Manufacturer Software Version.... 22
Object 100Ch: Guard Time.................................. 23
Object 100Dh: Life Time Factor........................... 23
Object 1010h: Store Parameters......................... 23
Object 1011h: Restore Parameters..................... 24
Object 1012h: COB-ID Time Stamp Object......... 24
Object 1013h: High Resolution Time Stamp........ 24
Object 1014h: COB-ID Emergency Object .......... 25
Object 1016h: Consumer Heartbeat Time........... 25
Object 1017h: Producer Heartbeat Time............. 25
Object 1018h: Identity Object .............................. 26
Object 1020h: Verify configuration....................... 26
Object 1029h: Error behaviour............................. 26
Object 1800h: 1st Transmit PDO Communication
Parameter............................................................ 27
Object 1801h: 2nd Transmit PDO Communication
Parameter............................................................ 27
Event Timer......................................................... 28
Object 1A00h: 1st Transmit PDO Mapping
Parameter............................................................ 28
Object 1A01h: 2nd Transmit PDO Mapping
Parameter............................................................ 29
Object 1F50h: Download Program Area.............. 29
Object 1F51h: Program Control........................... 29
Object 2000h: Position Value .............................. 30
Object 2100h: Operating Parameters.................. 30
Object 2101h: Resolution per Revolution ............ 31
Object 2102h: Total Resolution ........................... 31
Object 2103h: Preset Value................................. 32
Object 2104h: Limit Switch, min. ......................... 32
Object 2105h: Limit Switch, max. ........................ 33
Object 2160h: Customer storage......................... 33
Object 2200h: Cyclic Timer PDO......................... 34