A Simple Invert Switch
So far everything we’ve done in OpenTX has been a little more difficult than it would have been
on a conventional menu-driven transmitter. You’re probably wondering why anyone bothered to
write transmitter firmware that makes things more difficult. It’s not quite like that – Open TX does
make simple things a little more difficult, but it can make complicated things a lot simpler. Here’s
an example.
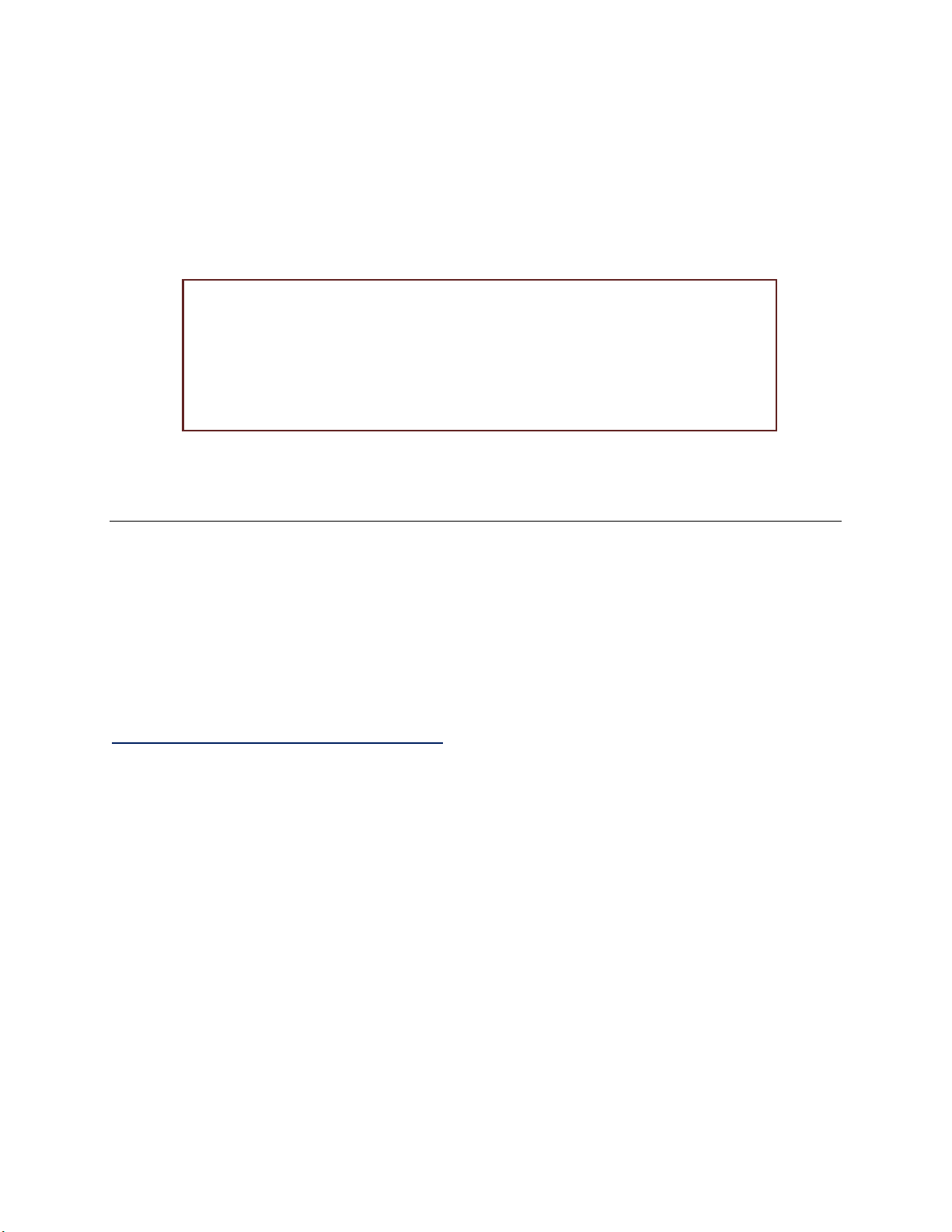
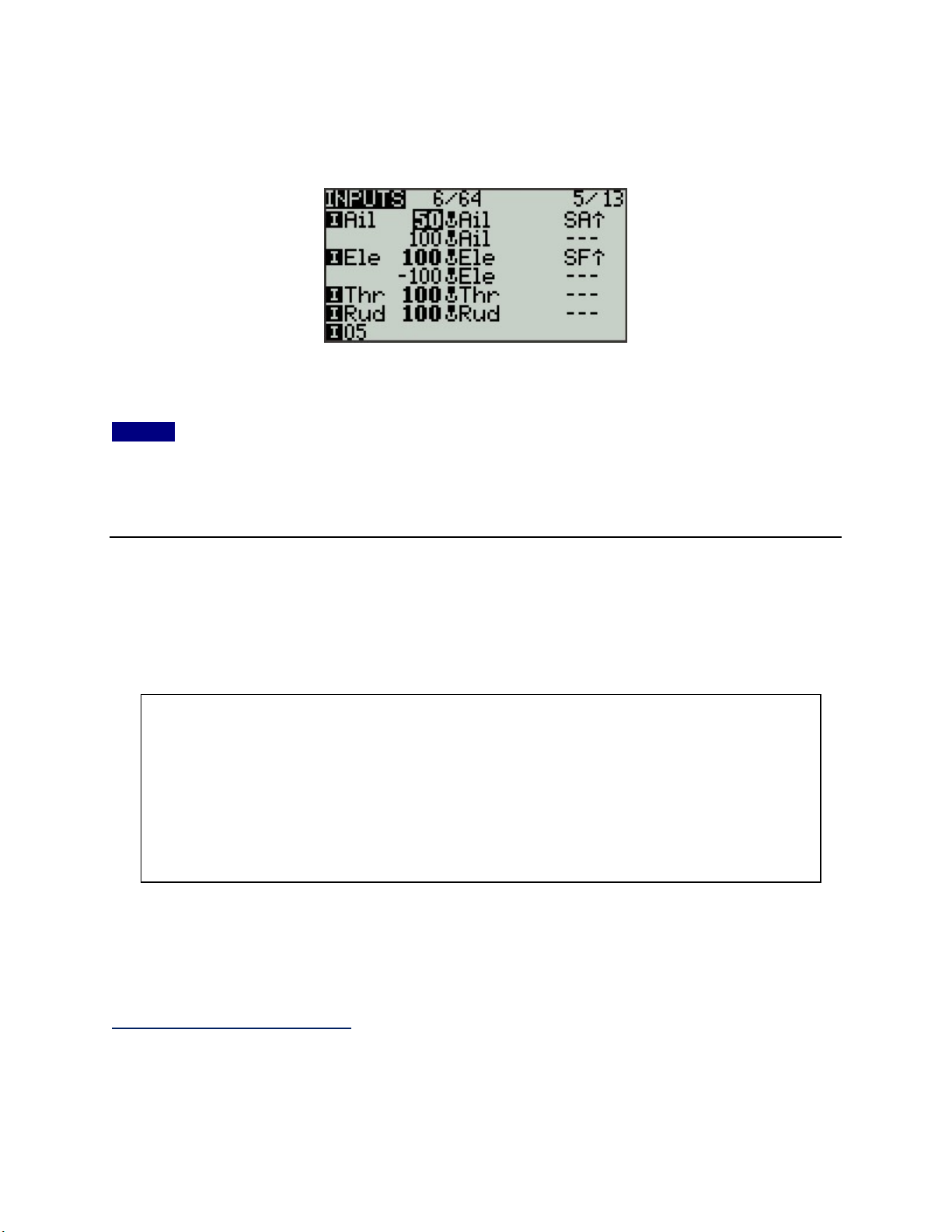
When a wheeled robot is inverted the steering remains correct, but the throttle
direction is reversed. Assigning a switch to reverse the response of the Elevator stick
axis in a conventional transmitter is complex, but in OpenTX it’s simple. On the
INPUTS screen:
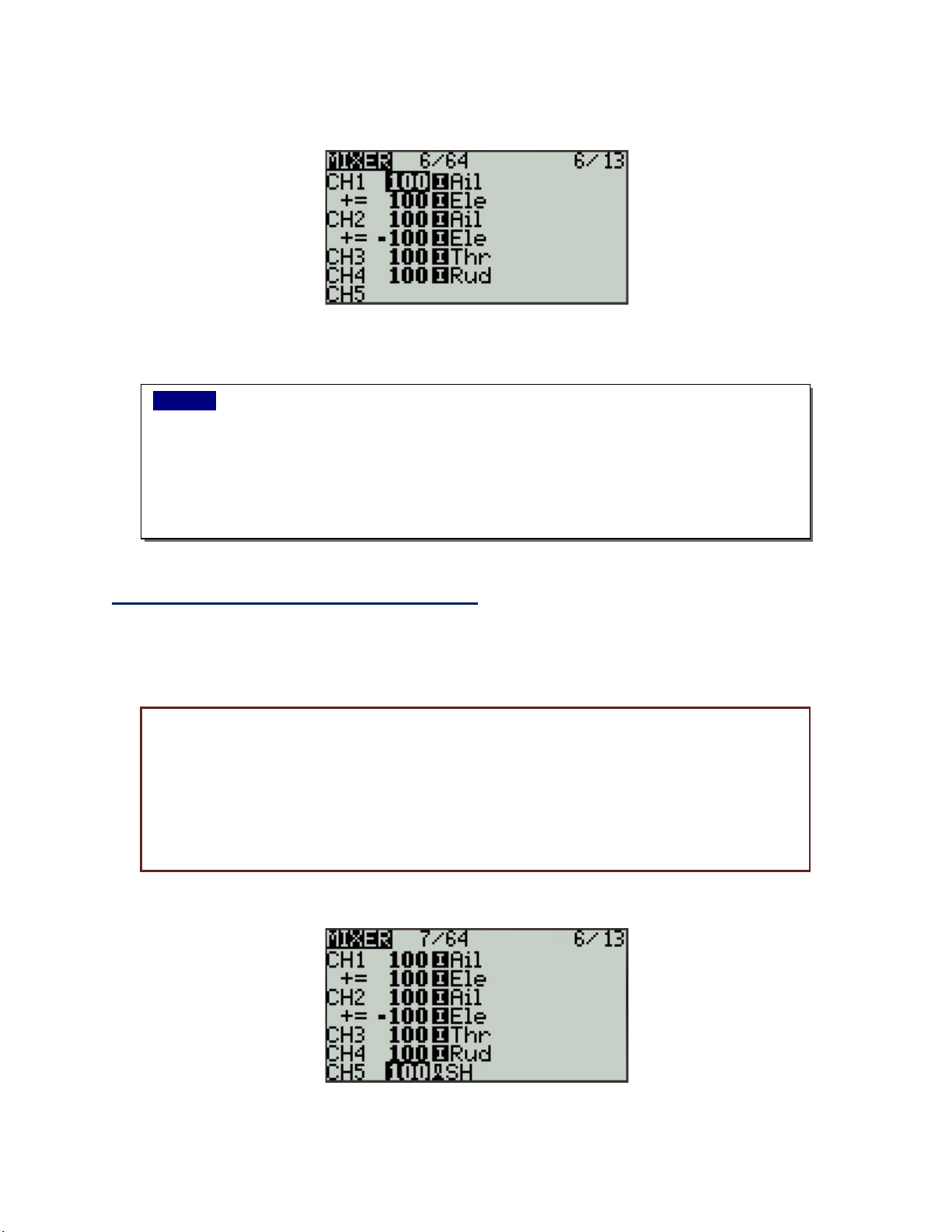
Use the scroll wheel to highlight the Ele line, then long-press the ENTER
button to bring up an action menu.
Tap ENTER to enter the Edit screen.
Scroll down to Switch, tap ENTER, flip switch SF down then back up.
Tap enter, tap EXIT twice.
Long-press the ENTER button again.
Scroll to Insert After and tap ENTER.
Scroll down to Weight, tap ENTER, scroll the value down to -100.
Tap enter, tap EXIT twice.
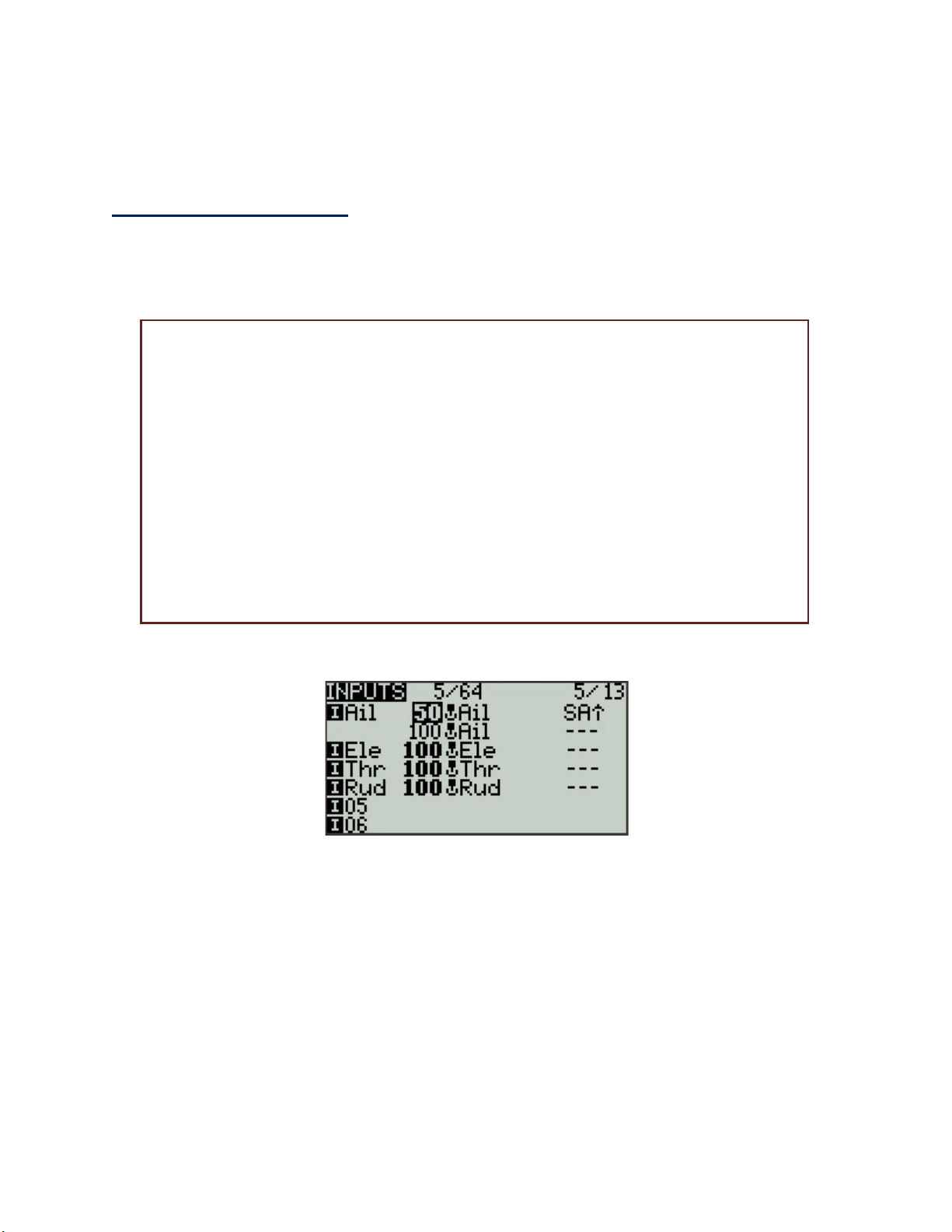
If there are multiple lines entered under a single input, the
transmitter evaluates the first line to see if any conditions it includes are met. If they
are, that line is used. If not, it skips down a line and repeats the evaluation process.
Our first Aileron line has the condition SA⇑ that requires that switch SA be
in the up position – the position the transmitter expects at start-up. If switch
SA is up the line will be accepted and the steering rate will be a controllable
50.
If switch SA is not up, the transmitter will skip down to the second line to
evaluate its condintion. Ths second line has no condition set, so it will be
accepted and the steering rate will be a very quick 100.
You can choose different values for the Weight to suit your driving preference --
and you can choose a different switch. Yes, you can add more lines for additional
conditions, but leave the last line with no conditions.